2.2 Aufnahmesysteme
In der Geofernerkundung werden mit dem Fortschreiten der technischen Entwicklung immer speziellere satelliten-, flugzeug- oder UAV-gestützte Sensoren zur Erkundung der Erde bzw. benachbarter planetarer Oberflächen eingesetzt. In dem folgenden Kapitel werden deshalb nur einige wichtige terrestrische Aufnahmensysteme beispielhaft skizziert und stellvertretend erläutert.
Photographische analoge Aufnahmesysteme
Die analoge photographische Aufnahme von Luft- und (historischen ) Satellitenbildern wird neben der digitalen Variante nach wie vor zur Analyse von Umweltphänomenen herangezogen und beruht auf den bekannten Methoden der Photographie. Die lichtempfindliche Schicht eines Filmes dient dabei als analoges Speichermedium und ist somit ein passives Aufnahmeverfahren, welches die Strahlung im VIS und NIR (400-1000 nm) je nach Filmempfindlichkeit über eine chemische Reaktion optisch aufnimmt (Abb. 2.2.1). Die klassische Luftbildtechnik bietet den Vorteil relativ preisgünstig und individuell Flächen zu erfassen. Allerdings gibt es auch gewichtige Nachteile, wie die schwierige radiometrische Kallibrierung photographischer Systeme, die geringe spektrale Bandbreite (s.u.) und ggf. der analoge Primärzustand der Daten (Negativ/Positiv), welche zur digitalen Weiterverarbeitung erst gewandelt werden müssen.
Üblicherweise werden in Flugzeugen fest montierte Reihenmeßkammern (RMK) in dem Bildformat 23 cm x 23 cm und wechselnden Brennweiten für die systematische Aufnahme von Geländeabschnitten im Maßstab zwischen 1:10.000 bis 1:30.000 verwendet. Daneben gibt es noch spezielle Handkammern für die lokale Schrägaufnahme.
Eckdaten/Definition Bildflug
- Luftbildaufnahme mit kalibrierten Reihenmesskamera
- Einblendung von Rahmenmarken und Zusatzinformation
- Hohe Aufnahmefrequenzen - kurze Verschlusszeiten
- Filmansaugung durch Vakuum (Planlage des Films!)
- Kompensierung der Bewegungsunschärfe durch Forward-Motion-Kompensation (FMK)
- Bildformat 23 x 23 cm
- GPS zur genauen Navigation
- teilweise Bestimmung des Projektionszentrums durch kinematisches GPS und der Bilddrehung (Parameter der äusseren Orientierung) durch Inertialsysteme (INS = Kreiselsysteme), damit Verringerung der benötigten Passpunkte
|
Abb.2.2.1a: Panchromatische Luftaufnahme und Color-Echtfarbluftaufnahme im Vergleich |

|
Abb. 2.2.1b: GPS-kinematische Reihenmeßkammer (RMK), Handkammern (Linhof) und RMK- Luftbild (Senkrechtaufnahme) mit typischen Indizes |

Die spektrale Empfindlichkeit der photographischen Schichten reicht vom VIS bis in das NIR. Man unterscheidet in der Fernerkundung panchromatische, chromatische und infrarotempfindliche Schichten, auf denen der Reflexionsgrad in Farb- bzw. Graustufen abgelichtet wird (Abb. 2.2.2). Aufgesetzte Objektivfilter erlauben bei der Aufnahmen das gezielte Ausblenden von einzelnen Spektralbereichen. Unterhalb von 400 nm wird die Energie der Strahlung weitgehend durch das Objektivglas absorbiert.
Typische photographische Filme sind somit:
Panchromatisch/Schwarz-Weiss (PAN): beste geometrische Auflösung; Anwendung bei hohen Genauigkeitsansprüchen an geometrische Information. Auch im nahen Infrarot (NIR) einsetzbar!
Farbe/Colour (F/C): hinreichende geometr. Auflösung, bessere thematische Interpretierbarkeit.
Falschfarben-Colour-Infrarot (CIR): hinreichende geometr. Auflösung, gute thematische Interpretierbarkeit (z.B. Vegetation).
Panchromatische Filme (inkl. NIR) oben
Panchromatische Schichten sind bis etwa 700 nm empfindlich, also für den gesamten Bereich des VIS. Da sie alle Reflexionswerte in abgestuften Grautönen (Gradation) wiedergeben, sind sie am weitesten verbreitet und dienen allgemein als Aufnahmemedium für allgemeine Kartierungszwecke (z.B. Kataster) in Form von sog. SW- oder PAN Filmen.
Infrarotempfindliche Filmschichten gehen mit ihrer Empfindlichkeit über 700 nm hinaus (bis etwa 1000 nm). Dies hat zur Folge, daß die abgelichteten Grautöne von dem Reflexionssempfinden des Menschen abweichen, wenn die Objekte im NIR wesentlich anders reagieren, als im VIS (z.B. Vegetation). Deshalb blendet man häufig kurzwelligere Strahlung durch geeignete Filter aus um so nur den NIR-Informationsgehalt abzulichten. panchromatische NIR-Bilder eignen sich z.B. besonders zur Unterscheidung von Laub- und Nadelbäumen (z.B. Vitalität), zur Ermittlung des Verlaufes von Wasserflächen und Uferlinien. Weiterhin wirken sie wegen der kräftigeren Schatten oft kontrastreicher als panchromatische Aufnahmen des VIS.
 |
Abb. 2.2.2: Spektrale Empfindlichkeit photographischer Schichten (aus Albertz, 1991) |
 |
Abb. 2.2.3: Panchromatische VIS (l) und NIR-Luftbilder (r) im Vergleich (aus Albertz, 1991) |
Farbfilme (inkl. CIR) oben
Farbfilme müssen stets aus mindestens drei Farbschichten aufgebaut sein, da sich die Farben aus den den drei Grundfarben des additiven Farbsystems Rot - Grün - Blau (rgb) zusammensetzen (Abb. 2.2.4). Die belichteten Schichten spiegeln dann das Reflexionsmaß in den drei Wellenlängenbereichen des VIS wieder.
Bei Farbinfrarotfilmen wird eine der Schichten (meist Rot) durch eine IR-sensible Schicht ausgetauscht, so daß anstatt Rot nun der Reflexionsgrad im NIR aufgenommen und zur Endfarbmischung herangezogen wird. IR-Farbfilme finden fast ausschließlich in der Vegetationsuntersuchung (s.o.) eine Rolle (z.B. Waldschadenskartierungen), da sich über den IR-Reflexionsgrad eine Aussage über Typ und Vitalitätsgrad der Vegetation ableiten läßt (Abb. 2.2.5). Die resultierenden Bilder werden oft auch als Falschfarbenaufnahmen bezeichnet, da die CIR-Farbwiedergabe der Objekte für das menschliche Auge ungewohnt ist.
 |
Abb. 2.2.4: Additiver Farbwürfel mit den Grundfarben (Primärfarben) Rot, Grün und Blau (rgb), (ERDAS, 1997) |
 |
Abb. 2.2.5: CIR- (l) und Farb-Echt-Luftbilder (r) im Vergleich (aus Albertz, 1991) |
Digitale Photosysteme (CCD) und Abtastsysteme (Scanner) oben
Im Gegensatz zur optisch-analogen Photographie wird das Maß der Reflexion bei digitalen Systemen nicht auf einem Film festgehalten, sondern direkt als elektrischer Impuls zeilenweise mittels Charged Coupled Devices (CCD) auf einem Chip gespeichert. Als Speichermedium dient also ein externes Speichermodul, welches regelmäßig geleert werden muß.
Bei der photographischen CCD-Bildaufnahme mit Objektivsystem erfolgt vom Flugzeug aus die Belichtung nicht auf analogem Filmmaterial, sondern direkt auf einem CCD-Sensor, welcher in der Regel auch im NIR die Reflexion der Oberflächen aufzeichnet bzw. abbildet. Durch die digitale Technologie werden mit einer Auslösung meist synchron drei verschiedene digitale Produkttypen realisiert:
- Panchromatisch, höhere geometrische Auflösung als VIS oder NIR
- Echtfarbe (VIS)
- Colourinfrarot (CIR)
Die Belichtung erfolgt auf allen CCD's gleichzeitig (also vergleichbar mit einem Film). Allerdings hat die CCD-Technik den Vorteil alle notwendigen Datentypen für die Weiterverarbeitung der Luftbilder auf einem PC's direkt in einem Arbeitsgang bereitszustellen - d.h. das gesamte optisch nutzbare Spektrum wird also synchron ausgeschöpft. Zwar liegen die Anschaffungskosten für eine derartige Kamera recht hoch (z.B. einer Digital Mapping Camera von Zeiss Z/I= DMC, 10cm/pixel bei 1000m Fluhöhe; Array Pixel : 4084 x 7128 pan; 2048 x 3074 RGB, Abb. 2.2.5a/b), werden heutzutage zunehmend eingesetzt und haben die analogen Luftbildsensoren zu nahezu verdrängt. Neben der DMC von Zeiss sind sicherlich noch die Vecxel Imaging UltraCam und die LHS ADS40 sowie deren aktuelle Systemnachfolger zu nennen.
 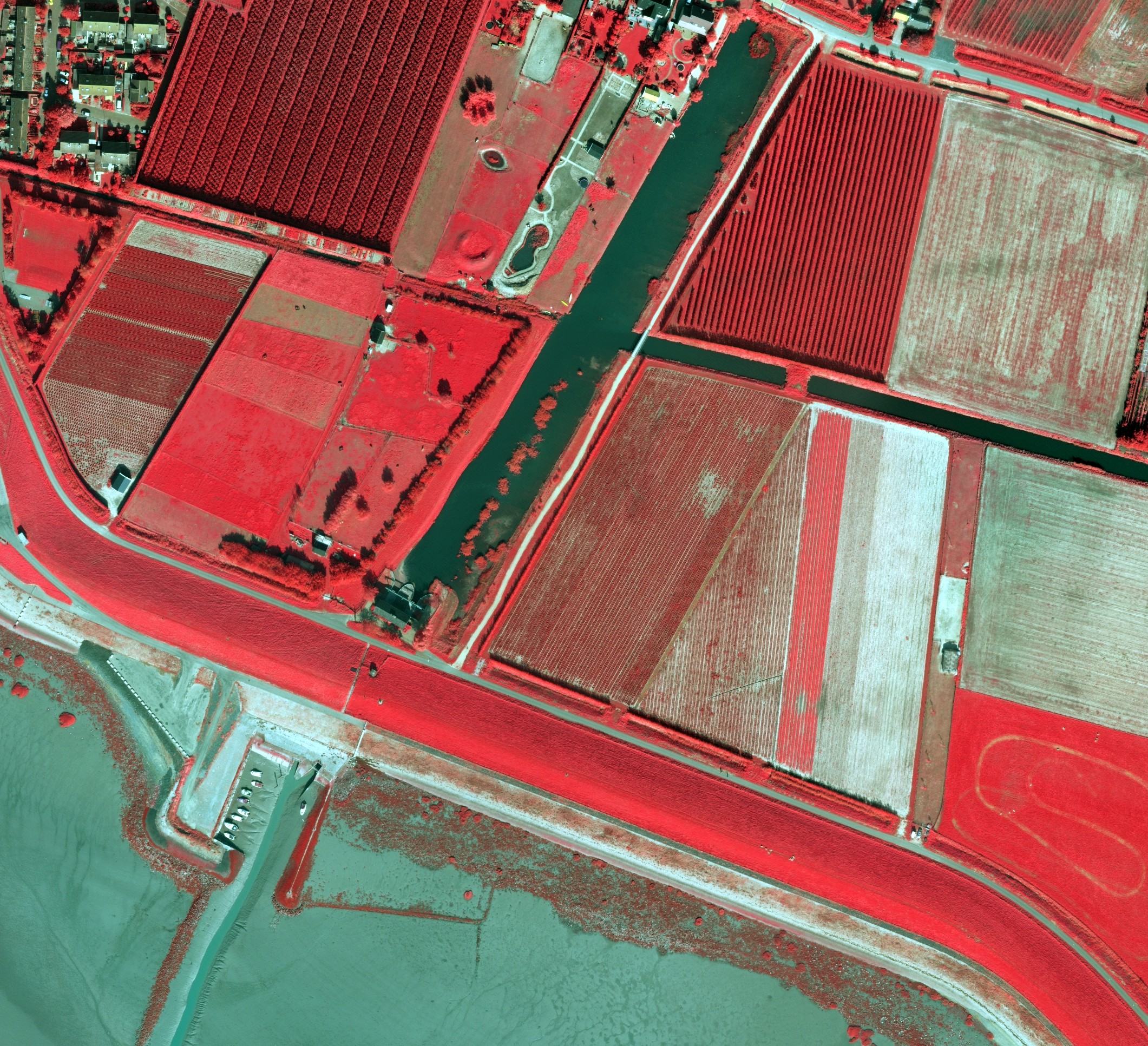 |
Abb. 2.2.5a/b: DMC Z/I und digitales CIR-Bild (Quelle: Hansa Luftbild GmbH, 2009 ) |
Neben den großformatigen digitalen Reihenmesskameras (RMK) spielen auch zunehmend digitale, hochauflösenden metrische Mittelformatkameras eine Rolle (Pixel Array: 5412 x 7216, vgl. PhaseOne). Eine Kombination mehrere derartiger Kameras Abb. 2.2.6a/b erlaubt den Übergang zu metrischen, digitalen Größtbildkameras, welche noch in der Entwicklung stehen (Abb. 2.2.6b).
 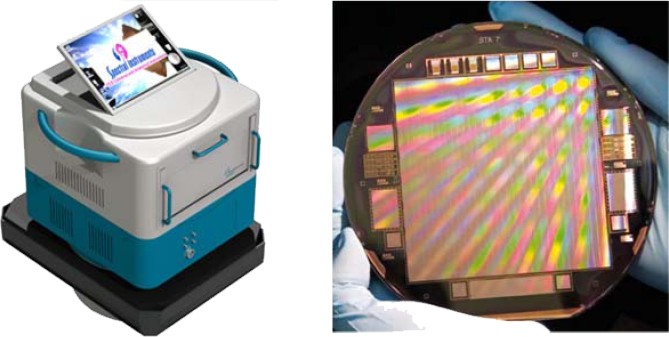 |
Abb. 2.2.6a/b: Digitale, metrische Mittelformatkameras (z.B. Rolleimetric) und die experimentelle Grossbildkamera SI5 von Spectral Instruments (Quelle: Spectral Instruments, 2013) |
Auch der Einsatz modifizierter digitaler Kleinformatkameras (small frame photography) auf ferngesteuerten, GPS-gelenkten autonomen Flugsystemen (Dronen) oder auch Unmanned Aerial Vehicles/Systems (UAV/S), z.B. in Form eines Multicopters (z.B. Quadrokopter) findet in den Geowissenschaften zunehmend Verbreitung. Die Vorteile liegen im hochflexiblen, ökonomischen Betrieb, der Exploration eines bisher nicht genutzten Flugraumes zwischen 20 und 300 m (also genau zwischen der klassischen terrestrischen und flugzeuggetragenen Fernerkundung oberhalb 300m) und der damit einhergehenden extrem hohen Bodenauflösung (im sub-cm-Bereich). Nachteile sind die bisher geringen Flugzeiten (durchnittlich ca. 20-60 Minuten bei Multikoptern oder Flächenflugzeugmodellen) und die je nach Drohnentyp variierende, geringe Traglast (i.d.R. weniger als 1kg). Auch sollten die häufigen low-cost Kamerasysteme kalibriert sein um eine möglichst verzerrungsfreie Darstellung bzw. Georeferenzierung zu gewährleisten. Insgesamt bieten diese Systeme jedoch ein hohes Nutzungpotential für die geowissenschaftliche Fernerkundung. Als aktuelle Produktivsysteme sind die 5-kanaligen UAV-Multispektralkameras von z.B. Micasense (2019) zu nennen


Abb. 2.2.6c: (Oben) Quadrokopter des Typs MD4-1000 (oben) mit CIR-Kleinformatkamera Lumix LX-1; (unten) CIR-Aufnahme Schlossgarten der WWU; ifgicopter, 2010)
Satellitenscanner oben
Auf den meisten klassischen satellitengetragenen Plattformen werden jedoch digitale Scanner eingesetzt. Man unterscheidet optoelektronische Scanner (z.B. beim SPOT-Satelliten) und optisch-mechanische Scanner (z.B. bei LANDSAT). Beide Scanner-Typen arbeiten passiv und finden sowohl in der Flugzeug-gestützten Geofernerkundung als auch in der Satelliten-getragenen Geofernerkundung Anwendung.
Die Funktionsweise eines optoelektronischen Scanners soll am Beispiel des französischen SPOT-Satelliten (Systeme Probatoire d'Oberservation de la Terre) erläutert werden. Hier erzielt man die Bildaufnahme mittels zeilenweise angeordneter Halbleiter-Bildsensoren; dies sind hochintegrierte Schaltungen auf Silicium-Chips, die für jeden Bildpunkt (Pixel) einen Photosensor enthalten. Hier sind besonders die CCD von Bedeutung, welche aus Ketten von Kondensatoren bestehen und durch Belichtung Ladungen freisetzen. Dieser Entladungsimpuls wird zeilenweise abgespeichert. Moderne CCD-Kameras verfügen über eine flächenhafte CCD-Anordnung, welche auch die geometrische Bodenauflösung bei gegebenen Orbit pro Pixel bestimmen (Zeilen x Spalten, vergleiche digitale Luftbildkameras oben!).
Zur CCD-Bildaufnahme vom Flugzeug oder Satelliten werden die CCD-Zeilen in der Bildebene eines Objektes angeordnet (Abb. 2.2.6) . Damit ist es möglich, alle Pixel einer senkrecht zur Flugrichtung orientierten Bildzeile gleichzeitig zu erfassen. Durch die Eigenbewegung des Sensorträgers wird bei entsprechender Aufnahmefrequenz ein Geländestreifen zeilenweise abgebildet (oder auch 'gefegt', deshalb engl.: pushbroom scanner). Das Bildende wird nach einer vordefinierten Zeilenmenge gesetzt.
 |
Abb. 2.2.6: Optoelekronische Bildaufnahme (Pushbroom Scanner) mit einem CCD-Sensor (aus Albertz, 1991) |
Vorteile der CCD-Technik sind die fehlenden mechanischen Bewegungen des Systems, die simultane Aufnahme der Reflexionswerte pro Zeile und die veränderbare geometrische Auflösung (über wechselnde Brennweiten der Optik!).
Beispielhaft: SPOT (SPOT-1 1986; SPOT-2 1990, -3 bis -4 ab 1994 sowie -5,-6 und -7 ab 2006) befinden sich je zwei identische Sensorsysteme, die offiziell die Bezeichnung Haute Resolution Visible (HRV) tragen und wahlweise im sogenannten XS-Modus (3 Spektralkanäle: blau-grün-rot/IR) oder P-Modus (panchromatisch) aufnehmen. Die geometrische Auflösung liegt im P-Modus bei 10m/Pixel, im XS-Modus bei 20m/Pixel. Zudem kann der Aufnahmewinkel geneigt werden, so daß auch Regionen neben der Bodenspur des Satelliten aufgenommen werden können. Durch Mehrfachbefliegung können so die gleichen Gebiete unter verschiedenen Blickwinkeln aufgenommen und Stereobildpaare erzeugt werden (wichtig für Geländemodelle, technische Details s.u., Abb. 2.2.7). Mit drei Spektralkanälen ist SPOT allerdings für eine multispektrale Analysen der Daten nur eingeschränkt tauglich.
 |
Abb. 2.2.7a: Schematische Darstellung der Aufnahmemöglichkeiten des SPOT-Satelliten (aus Albertz, 1991) |
 |
Abb. 2.2.7b: Schematische Darstellung der Stereo-Aufnahmemöglichkeiten des SPOT-Satelliten (aus Albertz, 1991) |
Optisch-mechanische Scanner, wie z.B. der LANDSAT TM-Scanner, tasten die Erdoberfläche über ein rotierendes spiegeloptisches System zeilenweise ab. Die ankommende Strahlung wird auf Detektoren focussiert und in digitale Signale umgewandelt. Dabei rotiert der Einfangspiegel um eine zur Flugbahn parallele Achse und somit wandert das Flächensegment (Pixel) quer zur Flugrichtung über das Gelände (Abb. 2.2.8). Da sich der Sensorträger zusätzlich in Flugrichtung bewegt, wird ein breiter Geländestreifen zeilenweise hintereinander aufgenommen. Die Aufnahme erfolgt in unterschiedlichen Bändern (multispektral), wobei die reflektierte Strahlung über ein Prisma in die einzelnen Wellenlängen zerlegt und auf einzelne Sensoren dedektiert wird. LANDSAT TM 5 (Thematic Mapper) verfügt über sechs Kanäle mit geometrischen Auflösungen von 30m/Pixel im reflektiven Bereich (Band 1, 2, 3, 4, 5, 7) und einen Kanal mit 120m/Pixel im emissiven/thermalen Bereich (Band 6). Der ältere Vorgänger, LANDSAT MSS (Multispectral Scanner) besitzt vier Kanäle und arbeitet seit 1972 nach dem gleichen Prinzip (Abb. 2.2.9) . Der neue Landsat (E)TM-7/8 hat gegenüber TM-5 eine verbesserte geometrische Auflösung von 20m/Pixel und einen zusätzlichen panchromatischen, hochauflösenden Kanal (15m/Pixel) -- die Spektralbereiche sind jedoch weitgehend gleichartig geblieben.
Ein großer Vorteil der multispektralen Scanner ist ihre spektrale Bandbreite - Nachteile sind die oft geringe geometrische Auflösung (Satelliten) und die aus der Spiegelbewegung zusätzlich resultierende Bildverzerrungen.
Beachte: Niedrig fliegende Flugzeugscanner (z.B. DEADALUS) erreichen weit höhere spektrale und geometrische Auflösungen; allerdings ist ihr Einsatz technisch recht aufwendig und finanziell kostspielig (bis zu 256 eng definierte Kanäle mit ca. 2m geometr. Auflösung). Sie sind also häufig als hyperspektrale Sensoren ausgelegt.
 |
Abb. 2.2.8: Schematische Darstellung der Zeilenabtastung mittels optisch-mechanischen Scanners (aus Albertz, 1991) |
 |
Abb. 2.2.9: Schematische Darstellung des Aufnahmeprinzips eines optisch-mechanischen Scanners am Beispiel des MSS (aus Albertz, 1991) |
Hyperspektrale Spektrometer oben
Abbildende Spektrometer, welche multispektrale Daten in sehr engen Spektralbändern des sichtbaren Lichts, des nahen und mittleren Infrarot in einem quasikontinuierlichen Spektrum mit mehr als 15 Kanälen aufzeichnen werden hyperspektral genannt. Die hohe spektrale Auflösung der objektspezifischen spektralen Signaturen in mehr als häufig 200 aneinandergrenzenden Kanälen gestattet die Dokumentation eines quasi kontinuierlichen Spektrums für jedes Bildelement. Damit werden Objekte der Erdoberfläche besser differenziert und dementsprechend klassifiziert, die charakteristische Absorptions- und Reflexionseigenschaften in sehr schmalen Spektralbändern aufweisen und von den konventionellen operationellen Sensorsystemen der Erdbeobachtung nicht aufgelöst werden können.
Bis vor Kurzem waren hyperspektrale Scanner nur auf Flugzeugplattformen im Einsatz (z.B. HyMap). Als erste Sensorsysteme auf Satellitenplattformen gelten MODIS im Rahmen der Terra-Mission auf EOS/AM-1 und Hyperion im Rahmen der EO1-Mission der NASA. Neueste satellitengestützte Systeme sind z.B. die aktuelle ENMAP-Mission mit 218 Kanälen.
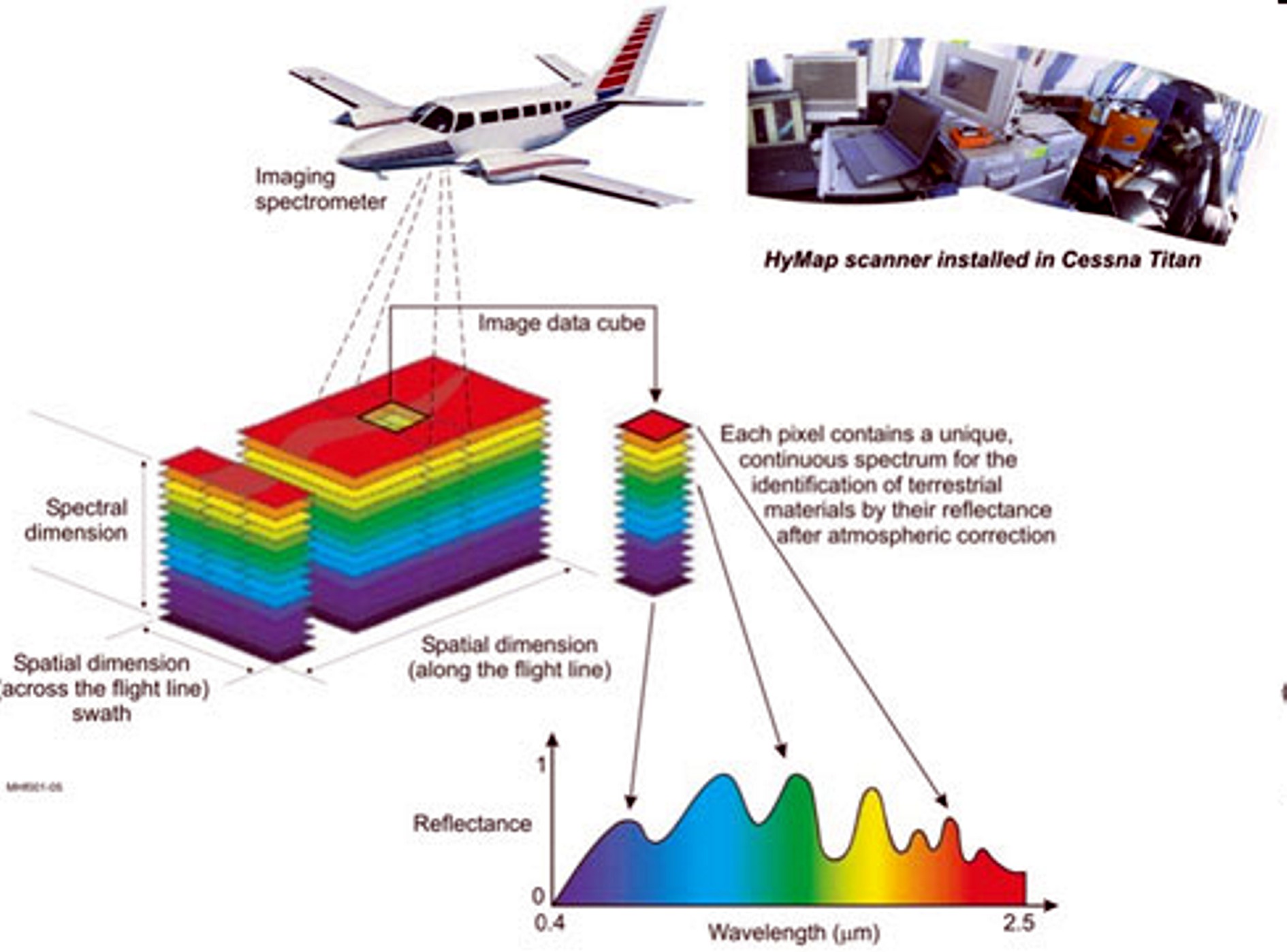
Abb. 2.2.9a: Schematische Darstellung des Aufnahmeprinzips eines hyperspektralen Scanners (hier: HyMap)
HyMap ist ein hyperspektraler Flugzeugscanner, der in Australien entwickelt wurde. HyMap Daten weisen 126 Spektralkanäle auf (0.45–2.5 μm). Die geometrische Auflösung beträgt ca. 5 Meter.
Abb. 2.2.9b: Darstellung von Hyperspektraldaten als image bzw. spectral cube (hier: HyMap)
Radarsysteme oben
Wie bereits in Kapitel 2.1 erläutert, handelt es sich bei den Radar-Verfahren in der Geofernerkundung um aktive Sensorsysteme im Mikrowellenbereich. Die Aufnahmetechnik unterscheidet sich grundlegend von den oben beschriebenen elektro-optischen Systemen. Dies gilt sowohl für den verwendete Wellenlängenbereich und die Aufnahmetechnik als auch für die physikalischen Parameter. Als aktives Verfahren erzeugt der Sensor die zur reflektierende Strahlung selbst; dabei handelt es sich stets um Mikrowellenstrahlung einer bestimmeten Frequenz und Polarisation im Bereich zwischen 1 und 100 cm. Die digitale Datenaufnahme erfolgt somit unabhängig von der natürlichen Strahlungsdichte und Wetterlage. Diese Eigenschaften verleihen der Radar-Technik eine Sonderstellung (!) in der Geofernerkundung.
In Abbildung 2.2.10 ist die Funktionsweise eines einfachen Seitensicht-Radarsystems skizziert. Im Sensorträger wird eine kombinierte Sender/Empfänger-Installation mitgeführt, dessen Antenne schräg nach unten gerichtet ist. Von der physikalischen Antennenlänge sind auch die möglichen Wellenlängen der Strahlung abhängig: je kürzer die Antenne (Apertur), desto stärker muß die Erzeugungsenergie der Strahlung sein bzw. desto geringer ist der Abstrahlwinkel bzw. die räumliche Auflösung. Deshalb werden über geschickte physikalische Konstruktionen und Betriebsprogrammierungen synthetische Antennenlängen mit höherer radiometrischer Auflösung für hohe Flugbahnen erzeugt. Derartige Radarsysteme mit synthetischer Apertur (SAR) finden besonders in der Satellitentechnik Anwendung.
Die SAR-Sensoren sind so konstruiert, daß sich die ausgestrahlten Mikrowellen in einem sehr schmalen Raumwinkel senkrecht zur Flugrichtung ausbreiten. Zu einem bestimmten Zeitpunkt erreicht die Wellenfront ein bestimmtes Flächensegment - die auftreffende Mikrowellenstrahlung wird teilweise reflektiert und kehrt zur Antenne zurück wo sie als Signal aufgezeichnet wird. Da sich der Sensorträger in Flugrichtung über das Gelände bewegt, können so seitlich Bildstreifen erfaßt und zu Geländeflächen bildhaft zusammengefügt werden. Derartige seitenbestrahlende Radarsysteme werden auch als Seitensicht-Radar oder SLAR (Side-Looking-Airborne-Radar) bezeichnet.
 |
Abb. 2.2.10: Schematische Darstellung der Radaraufnahme eines SLAR (aus Albertz, 1991) |
Die Art und Weise, wie die Erdoberfläche in Radarbildern wiedergegeben wird, hängt von komplexen Zusammenwirken vieler Einzelfaktoren ab:
- Parameter des Aufnahmesystems, wie Wellenlänge und Polarisation der Strahlung, (synthetische) Antennenlänge des Senders, dem Depressionswinkel
- Parameter der Geländeoberfläche, wie Oberflächenrauhigkeit, -textur und -form, -feuchte sowie dielektrische Eigenschaften der Materialien
Die Wellenlänge und Frequenz (Polarisation!) der Mikrowellenstahlung hängt unmittelbar von der technischen Konstruktion des Systems ab. Weit verbreitet in der Geofernerkundung sind folgende Bänder:
K-Band |
W = 0,7 - 1 cm |
F = 30 - 40 Ghz |
|
X-Band |
W = 2,4 - 4,5 cm |
F = 7 - 12 GHz |
|
C-Band |
W = 4,5 - 7,5 cm |
F = 4 - 7 GHz |
|
L-Band |
W = 15 - 30 cm |
F = 1 - 2 GHz |
Je nach Wellenlänge unterscheiden sich die Wechselwirkungen mit der Erdoberfläche, so daß eine Differenzierung in obige SAR-Bänder sinnvoll ist. Neben der Bandbreite der Radarstrahlung spielt auch die Polarisation eine wichtige Rolle. Die Strahlung kann beim Senden/Empfangen horizontal (H) oder vertikal (V) polarisiert sein. Bei Sendung und Empfang kann zwischen beiden Phasen hin und her geschaltet werden, so daß insgesamt vier unterschiedliche Modi nach der Wechselwirkung resultieren: VV, VH, HH und HV. Daraus resultiert ein multispolarisiertes Auswertepotential (ähnlich den klassischen multispektralen Ansätzen von Scannern).
Als weiterer Faktor ist der Depressions- oder auch Bestrahlungsswinkel wichtig. Er ist der Winkel zwischen der Horizontebene des Sensorträgers und dem beobachteten Punkt im Gelände; dieser Winkel wirkt sich auf die Bestrahlungsstärke und auf die Geometrie des Bildes aus.
Wesentlicher Faktor bei der Beurteilung von Radarbildern ist die Oberflächenrauhigkeit. Generell gilt: Je größer die Rauhigkeit des Geländes in Bezug zur verwendeten Wellenlänge, desto intensiver das Radarecho! Ist die Rauhigkeit im Vergleich zur Wellenlänge gering (z.B. glatte Wasserflächen) wird die Strahlung derart reflektiert, das kein Signal am Empfänger ankommt (es resultieren schwarze Pixel). Liegt die Rauhigkeit im Bereich der Wellenlänge, wirkt die Oberfläche als diffuser Reflektor mit gemischtem Radarecho und z.T. direkter Reflexion (graue bis hellgraue Flächen mit hohem Interferenzanteilen: sog. Speckle).
Weiterhin spielt die Exposition der Oberflächenform eine große Rolle im Hinblick auf das resultierende Radarecho (Abb. 2.2.11). Sind Flächen der schräg einfallenden Mikrowellenstrahlung zugewandt werden diese auch stärker bestrahlt (starkes Signal). Im umgekehrten Fall weisen strahlungsabgewandte Flächen ein nur geringes Radarecho auf (im Extremfall tiefe Schlag- bzw. Radarschatten).
 |
Abb. 2.2.11: Wirkung von Oberflächenrauhigkeit und -form auf das Radarsignal: ruhiges Flussdelta mit Mangrovenwald (links), dicht bewaldete Gebirgsregion (rechts), (aus Albertz, 1991) |
Von großem Einfluß auf das Reflexionsvermögen der Materialien sind zudem ihre elektrischen Eigenschaften. Besonders starke Reflexion tritt an metallischen Strukturen auf. Auch die Feuchtigkeit des Materials wirkt sich auf die dielektrische Konstante der Oberflächen aus. Feuchte Böden reflektieren deshalb Radarstrahlung sehr stark. Die Energie dringt so nur sehr gering in den Boden ein. Trockene Böden erlauben eine größere Eindringtiefe und gestatten so in geringem Umfang Aussagen über den tieferen Untergrund.
Zusammenfassend kann man sagen, daß die Wechselwirkung von Radarstrahlung und Materie sehr komplex und bis heute Gegenstand der Forschung ist. Entsprechend schwierig ist auch die quantitative Analyse von Radarbildern, da sie auf überwiegend schwer rekonstruierbaren Zusammenhängen basieren. Oft werden bei ihrer Interpretation nur die geometrischen und morphologisch-strukturellen Aspekte näher betrachtet. Mit dem Aufkommen neuer satellitengetragener Radarsysteme setzt man sich in der Geofernerkung zunehmend mit Radardaten und ihrer Analyse auseinander.
Wichtige Geofernerkundungssysteme oben
Neben den oben prinzipiell beschriebenen Fernerkundungssystemen gib es eine Vielzahl von sehr speziellen Sensoren, deren Funktionalität zwar sehr ähnlich, aber in ihrer radiometrischen und geometrischen Auflösung sowie der genutzten Trägerplattform (Flugzeug, Satellit) unterschiedlich konzipiert sind. An dieser Stelle sollen die momentan wichtigsten satellitengetragenen Geofernerkundungsysteme kurz in Form eines 'Steckbriefes' vorgestellt werden. Die derzeitige Tendenz geht eindeutig in Richtung kleinerer Systeme mit hochauflösenden Sensoren, welche möglichst flexibel einsetzbar sind (vgl. Tab. 2.2.1 und 2.2.2).
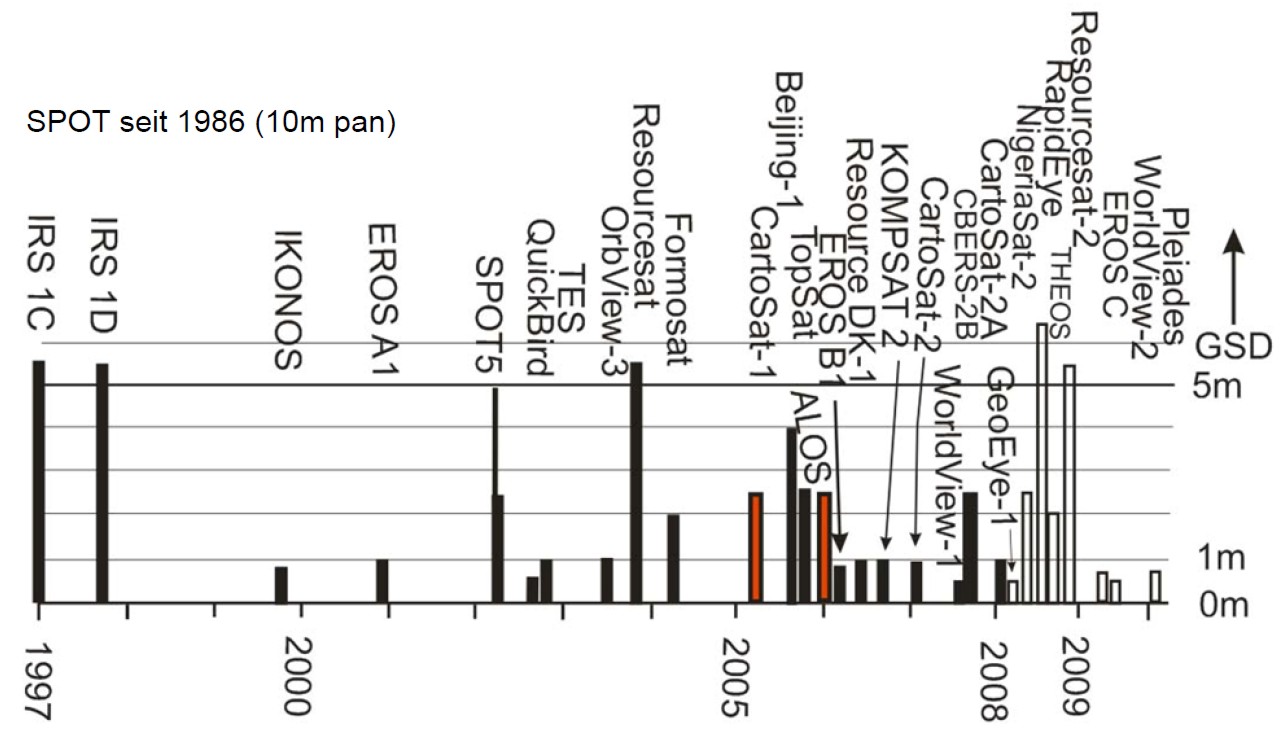 |
Tab. 2.2.1: Wichtige hochauflösenden Systeme seit 1997 (modifiziert nach Jacobsen, 2008) |
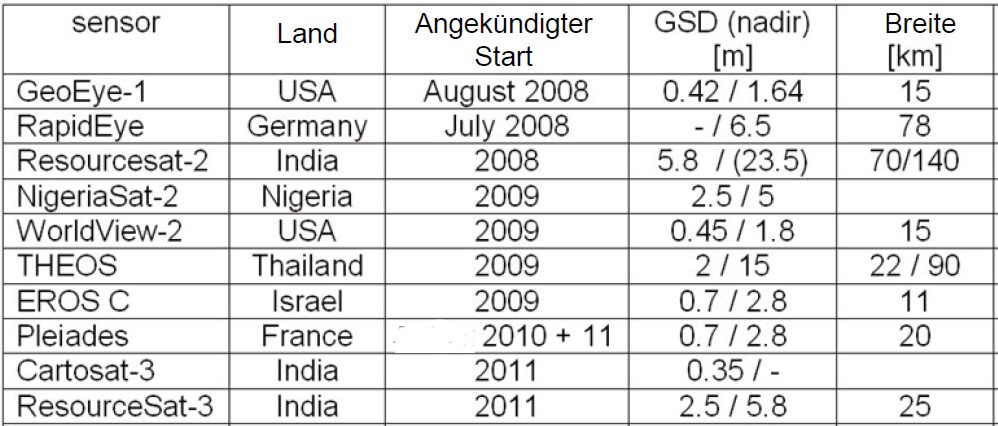 |
Tab. 2.2.2: Neuere Systeme seit 2008 (modifiziert nach Jacobsen, 2008) |
ERS oben
European Remote Sensing Satellite (-1 und -2, -1 seit 2000 nicht mehr aktiv!), erster europäischer Radar-Fernerkundungssatellit
Sensoren:
- Aktives Mikrowellen Instument (AMI)
- Synthetische Apertur Radar (SAR) mit 30m/Pixel
- Wave Scatterometer mit 50m/Pixel
- Wind Scatterometer
- Radar Altimeter (RA)
- Along Track Scanning Radiometer und Mikrowellen Sounder (ATSR+M)
- Precise Range and Range Rate Equipment (PRARE)
- Laser Retro Reflector (LRR)
Orbit:
- Sonnensynchroner Orbit
- Flughöhe 777 km
- Inklination 98,5°
- Umlaufperiode 100 Minuten
- Wiederholzyklus 3 Tage
- Bildgröße ca. 100 km x 100 km
- Auflösung: ca. 10m/p
Anwendungen:
- Ozeanographie
- Glaziologie
- Geographie
- Geologie
- Landschaftsökologie
- Hydrologie
 |
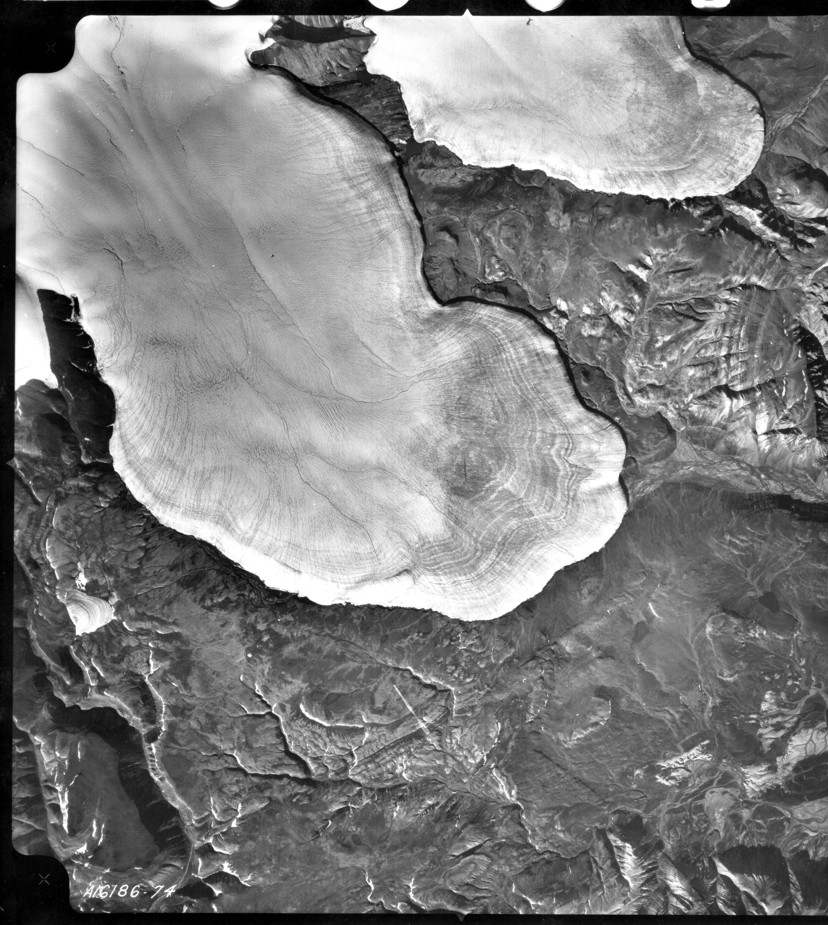
Abb. 2.2.12: ERS-1 Aufnahme der Westküste Grönlands (aus ESA, 1992) |
| GEOEYE-1 oben | ||
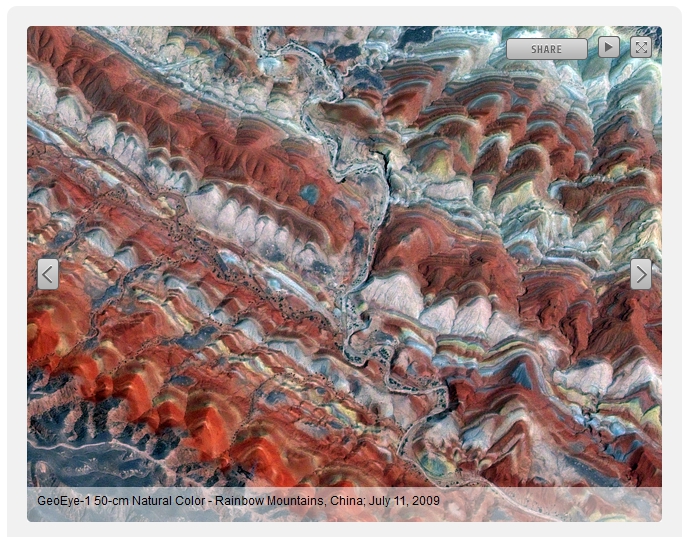
On September 6, 2008 GeoEye launched the first of their second-generation high-resolution satellites, GeoEye-1. This satellite collects 41-centimeter (cm) panchromatic and 1.65-meter (m) 4-band multispectral (i.e. blue, green, red and NIR) imagery. GeoEye-1 circles 681 kilometers (km) above our planet, reducing the satellite’s revisit time to less than 3 days.
|
||
 |
||
|
GeoEye-1 Specifications
Launch Details
Components
Orbit Characteristics
Imaging System
|
||
|
|||
Worldview-3 oben |
|||
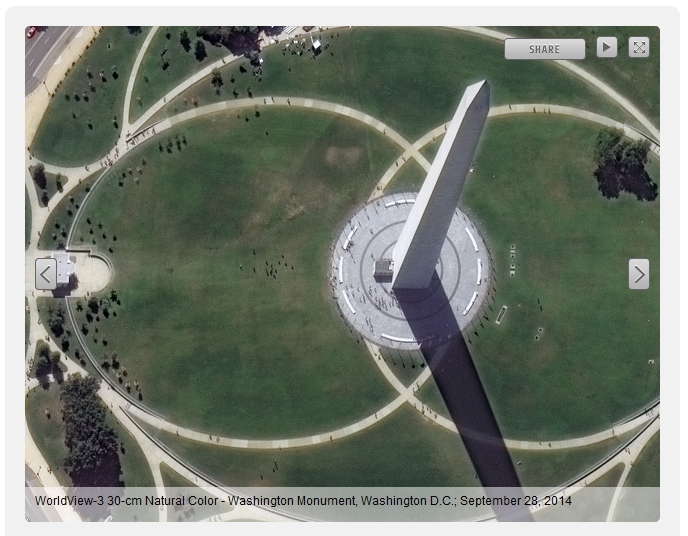
WorldView-3 is the younger, more sophisticated ‘satellite sister’ of DigitalGlobe’s WorldView-2. Launched into orbit from Vandenberg Air Force Base, California on August 13, 2014, WorldView-3 is now the world’s most technologically advanced high-resolution satellite. WorldView-3 collects 31-centimeter (cm) panchromatic, 1.24-meter (m) multispectral, 3.7-m shortwave infrared (SWIR) and 30-m CAVIS imagery. At a maximum 31-cm resolution, this imagery will rival the clarity of 20 to 30-cm aerial data given its superior optical and production systems. Not only is WorldView-3 the highest resolution satellite ever launched, it features 29 spectral bands of remotely sensed data which is nearly 6 times more than any sensor – other than WorldView-2’s 9 bands that is. Boldly going where no satellite has gone before, WorldView-3 offers a high resolution panchromatic band and 8 multispectral bands which are ideal for visual analysis, bathymetric studies and plant health assessments; 8 short-wave infrared bands which are ideal for mineral and hydrocarbon exploration; and 12 CAVIS bands which are ideal for improved atmospheric corrections. |
|||
 |
|||
|
Launch Details
Orbit Characteristics
Imaging System
|
|||
IRS (LISS) oben
Indian Remote Sensing Satellite, erster indischer, multispektraler Fernerkundungssatellit (siehe auch unten: IRS-P6)!
Sensoren:
- Pushbroom Scanner mit 2048 Elementen
- 4 Kanäle
Kanal |
Wellenlänge |
Pixelgröße LISS 1 |
Pixelgröße LISS 2 | Pixelgröße LISS 3 | |
1 |
450-520 nm |
72,5 m |
36,25 m | 25 m | |
2 |
530-590 nm |
72,5 m |
36,25 m | 25 m | |
3 |
620-680 nm |
72,5 m |
36,25 m | 25 m | |
| 4 | 770-860 nm | 72,5 m | 36,25 m | 25 m |
Orbit:
- Sonnensynchroner Orbit
- Flughöhe 904 km
- Inklination 99,5°
- Umlaufperiode 102 Minuten
- Wiederholzyklus 22 Tage
- Bildgröße ca. 150 km x 150 km
Anwendungen:
- Geographie
- Geologie
- Landschaftsökologie
- Hydrologie
 |
Abb. 2.2.13: LISS-2 Aufnahme des zentralen Teils des Grand Canyons/Arizona (124=rgb) |
LANDSAT RBV, MSS (-1, -2, -3) und TM (-4, -5, -7 und -8) oben
US-amerikanischer Miltispektralsatellit, ERTS/LANDSAT-Satelliten ähnlicher Bauart von 1972 bis heute.
Sensoren:
- Multispektral Scanner (MSS) und Thematic Mapper (TM) bzw. Enhanced Thematic Mapper (ETM) und OLI sowie TIRS (Landsat ETM -8)
- 5 (MSS) bzw. 7 Kanäle (TM) und PAN (nur TM -7 bzw. -8) sowie zusätzlicher TIR und UV-Sensorik (-8)
- Return Beam Videocon, dreikanalig (RBV, nur MSS)
Orbit:
- Sonnensynchroner, polnaher Orbit
- Flughöhe 920 km (1-3, MSS) bzw. 705 km (4-5, 7, 8 TM)
- Umlaufperiode ca. 100 Minuten
- Wiederholzyklus 18 bzw. 16 Tage
- Bildgröße ca. 185 km x 180 km
Anwendungen:
- Glaziologie
- Geographie
- Geologie
- Hydrologie
- Landschaftsökologie
- Land- und Forstwirtschaft
 |
Abb. 2.2.14: LANDSAT TM 5 Aufnahme des zentralen Teils des Grand Canyons/Arizona (421=rgb) |
 |
Abb. 2.2.14b: Panchromatische LANDSAT TM 7 Aufnahme von Siuox Fall (USA) mit 15 m geometrischer Auflösung (EURIMAGE) |
Insbesondere werden folgende Schwerpunkte bei der Auswertung von E/TM Bändern gesetzt:
- Band 1: Boden- und Vegetationsdifferenzierung
- Band 2: s.o.
- Band 3: Chlorophyllabsorptionen, Vegetationsdifferenzierung
- Band 4: Biomassenkartierung
- Band 5: Gesteine, Böden, Wasser, Vegetationsfeuchte
- Band 6, 10, 11: thermale Kartierung
- Band 7: hydrothermale Kartierungen von Gesteinen (Exploration)
- Band 1 und 9 (TM-8): Küstengewässer und Cirrus Detection (Wolken)
Den aktuellen Landsat 8 Flyer gibt es hier....
| LANDSAT 4,5 (1-3) | LANDSAT 4,5 | LANDSAT 7 | LANDSAT 8 | |
|---|---|---|---|---|
| Abtast-System | Multispectral Scanner
(MSS) |
Thematic Mapper
(TM) |
Enhanced Thematic
Mapper Plus (ETM+) |
Operational Land Imager (OLI) und Thermal Infrared Sensor (TIRS) |
| Betrieb | seit 1972 | seit 1982 | seit 1999 | seit 2013 |
| Pixelgröße | 79 x 79 m | 30 x 30 m | 30 x 30 m | 30 x 30 m |
| Spektralkanäle | 1 (4) 0,50 - 0,60 µm, Grün
2 (5) 0,60 - 0,70 µm, Rot 3 (6) 0,70 - 0,80 µm, nahes Infrarot 4 (7) 0,80 - 1,10 µm, nahes Infrarot |
1 0,45 - 0,52 µm, Blau-Grün
2 0,52 - 0,60 µm, Grün 3 0,63 - 0,69 µm, Rot 4 0,76 - 0,90 µm, nahes Infrarot 5 1,55 - 1,75 µm, mittleres Infrarot 7 2,08 - 2,35 µm , mittleres Infrarot |
1 0,45 - 0,52 µm, Blau-Grün
2 0,53 - 0,61 µm, Grün 3 0,63 - 0,69 µm, Rot 4 0,78 - 0,90 µm, nahes Infrarot 5 1,55 - 1,75 µm, mittleres Infrarot 7 2,09 - 2,35 µm , mittleres Infrarot |
1 0,433 – 0,453 µm, Küste und Aerosol
2 0,450 – 0,515 µm, Blau 3 0,525 – 0,600 µm, Grün 4 0,630 – 0,680 µm, Rot 5 0,845 – 0,885 µm, nahes Infrarot 6 1,560 – 1,660 µm, mittleres Infrarot 7 2,100 – 2,300 µm, mittleres Infrarot 9 1,360 – 1,390 µm, Cirrus |
| Thermalkanal | 6 10,4 - 12,5 µm (120 x 120 m) | 6 10,4 - 12,5 µm (60 x 60 m) | 10 10,30 – 11,30 µm (100 x 100 m)
11 11,50 – 12,50 µm (100 x 100 m) |
|
| Panchromatischer Kanal | 8 0,52 - 0,90 µm (15 x 15 m) | 8 0,500 – 0,680 µm (15 x 15 m) | ||
IKONOS oben
Hochauflösender PAN/Multispektralsatellit im Betrieb durch GeoEye. (USA)
Daten:
  |
 |
Abb. 2.2.14e: IKONOS panchro- matische Aufnahme von Fort Worth/ Texas nach dem verheerenden Tornado im Jahre 2000 (GeoEye) |
 |
Abb. 2.2.14f: IKONOS panchromatische Aufnahme von Fort Worth/Texas in Originalauflösung (GeoEye) |
METEOSAT oben
Europäischer Wettersatellit im Verbund mit GOES EAST, GOES WEST, GMS Wettersatelliten
Sensoren:
- Visible/IR-Scan Radiometer (VISSR)
Typ |
Wellenlänge |
Pixelgröße |
radiom. Auflösung | |
Reflexion |
400-1100 nm | 2,5 km x 2,5 km |
0,5-1,5 K | |
Emission (Wasserdampf) |
5700-7100 nm |
5 km x 5 km |
s.o. | |
Thermal IR |
10500-12500 nm |
s.o. |
s.o. |
Orbit:
- Geostationäres Orbit
- Flughöhe 35800 km
- Abtastbreite 55°N-55°S, 55°W-55°E
- Wiederholungsrate 30 Minuten
- Wiederholzyklus 22 Tage
Anwendungen:
- Wetterbeobachtung
Abb. 2.2.15: METEOSAT Europa aktuell (klicken!)
NOAA oben
US-amerikanischer Klimasatellit, im Verbund mit den TIROS Wettersatelliten
Sensoren:
- Advanced Very High Resolution Radiometer/Scanner (AVHRR)
Modus |
Wellenlänge |
Pixelgröße |
radiom. Auflösung | |
HRPT |
580-680 nm, 725-1100 nm, 3550-3930 nm | 1,1 km x 1,1 km | 10 bit | |
| APT | 10500-11500 nm,
11500-12500 nm |
3 km x 3 km |
s.o. |
Orbit:
- Sonnensynchrones, polares Orbit
- Flughöhe 833 km
- Abtastbreite 3000 km
- Umlaufdauer 102 Minuten
Anwendungen:
- Wetter- und Klimabeobachtung
 |
Abb. 2.2.16: NOAA Aufnahme NE-Island |
MOMS oben
Europäischer Modularer Optoelektronischer Multispektralscanner
Sensoren:
- Doppeloptik RETICON CCPD 1728 mit 4 CCD-Arrays
Typ |
Wellenlänge |
Pixelgröße |
radiom. Auflösung | |
Rot |
575-625 nm | 1,1 km x 1,1 km | 10 bit | |
| IR | 825-975 nm |
3 km x 3 km |
s.o. |
Orbit:
- Shuttle Missionen
- Flughöhe ca. 300 km
- Abtastbreite 140 km
Anwendungen:
- Wetterbeobachtung
- allg. Geowissenschaften
 |
Abb. 2.2.17: MOMS Aufnahme Südkorea (EOSAT) |
SEASAT oben
US-amerikanischer SAR Satellit
Sensoren:
- Synthetic Aperture Radar (SAR)
Typ |
Wellenlänge |
Pixelgröße |
radiom. Auflösung | |
SAR |
L-Band 23,5 cm | 25 m x 25 m | 5 bit |
Orbit:
- Sonnensynchroner, polarer Orbit
- Flughöhe ca. 800 km
- Abtastbreite 100 km
- Inklination 108°
Anwendungen:
- Wetterbeobachtung
- Eisprognosen
- Klima
- Geologie
- Land- und Forstwirtschaft
- Kartographie
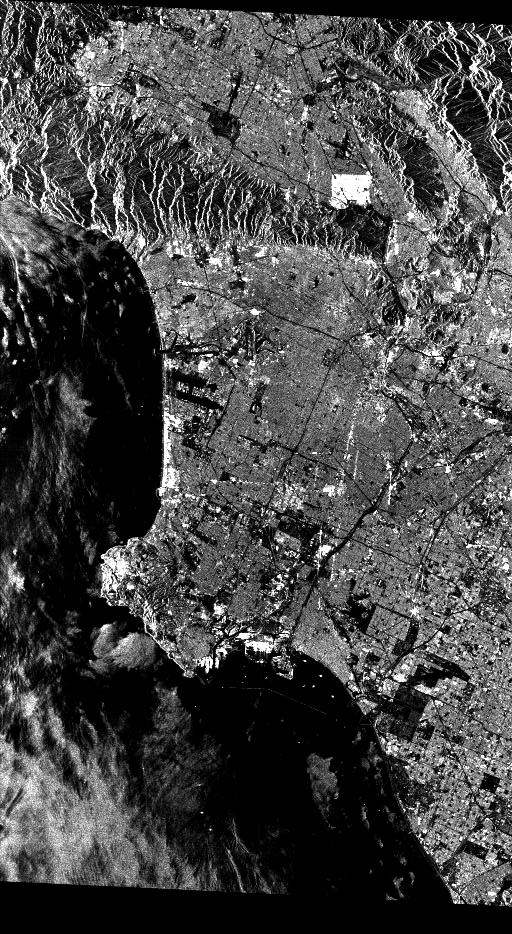 |
Abb. 2.2.18: SEASAT Aufnahme von Los Angeles |
COSMOS (KVR/A 1000) oben
Russischer Spionagesatellit mit hochauflösender optischer Kamera (bis 2000)
Sensoren:
- Panchromatische, optische Hochleistungskamera KVR 1000, wichtig bzgl. historischen Monitoring
Orbit:
- Sonnensynchroner, polnaher Orbit
- Brennweite 1000 mm
- Auflösung 2 m
- Wiederholzyklus 98 min
- Bildgröße ca. 6 km x 6 km
Anwendungen:
- ehem. militärische Zwecke
- Geographie
- Geologie
- Landschaftsökologie
Land- und Forstwirtschaft
 |
Abb. 2.2.19a: Panchromatische KVR 1000 Aufnahme des COSMOS-Satelliten vom Ostseebad Binz |
SPOT -1 bis -4 (-5,-7) oben
Französischer Erderkundungssatellit, seit 1986 bis heute.
Alle SPOT-Satelliten hatten bzw. haben Sensoren an Bord, die jeweils in unterschiedlichen Modi betrieben werden können.
Die Sensoren sind:
- SPOT 1: (+) HRV mit XS- (multispektral) und P-Modus (panchromatisch)
- SPOT 2: (+) HRV mit XS- (multispektral) und P-Modus (panchromatisch)
- SPOT 3: (+) HRV mit XS- (multispektral) und P-Modus (panchromatisch)
- SPOT 4: (+) HRVIR mit XI- (multispektral) und M-Modus (panchromatisch)
- SPOT 5: (+) HRG mit HI- (multispektral), HX- (multispektral), HM- (panchromatisch) und THR-Modus (panchromatisch)
- SPOT 6 & 7 : (multispektral) und (panchromatisch)
(+) Satellit nicht mehr in Betrieb
| Sensor | Frequenzband | Ortsauflösung in m | Wellenlänge in μm |
|---|---|---|---|
| SPOT 1 SPOT 2 SPOT 3 |
Panchromatisch B1: grün B2: rot B3: nahes Infrarot |
10 × 10 20 × 20 20 × 20 20 × 20 |
0,50 – 0,73 0,50 – 0,59 0,61 – 0,68 0,78 – 0,89 |
| SPOT 4 | Panchromatisch B1: grün B2: rot B3: nahes Infrarot B4: mittleres Infrarot |
10 × 10 20 × 20 20 × 20 20 × 20 20 × 20 |
0,61 – 0,68 0,50 – 0,59 0,61 – 0,68 0,78 – 0,89 1,58 – 1,75 |
| SPOT 5 | Panchromatisch B1: grün B2: rot B3: nahes Infrarot B4: mittleres Infrarot |
2,5 × 2,5 oder 5 × 5 10 × 10 10 × 10 10 × 10 20 × 20 |
0,48 – 0,71 0,50 – 0,59 0,61 – 0,68 0,78 – 0,89 1,58 – 1,75 |
| SPOT 6 SPOT 7 |
Panchromatisch B1: blau B2: grün B3: rot B4: nahes Infrarot |
1,5 × 1,5 6 × 6 6 × 6 6 × 6 6 × 6 |
0,45 – 0,74 0,45 – 0,52 0,53 – 0,59 0,62 – 0,69 0,76 – 0,89 |
    |
Quelle: CCSR |
Orbit:
- Sonnensynchroner, polnaher Orbit
- Flughöhe 832 km
- Umlaufperiode ca. 101 Minuten
- Wiederholzyklus 1 bis 4 Tage
- Bildgröße ca. 60 km x 60 (85) km
Anwendungen:
- Glaziologie
- Geographie
- Geologie
- Landschaftsökologie
Land- und Forstwirtschaft
 |
Abb. 2.2.19: SPOT-P Aufnahme von San Diego/ Kalifornien |
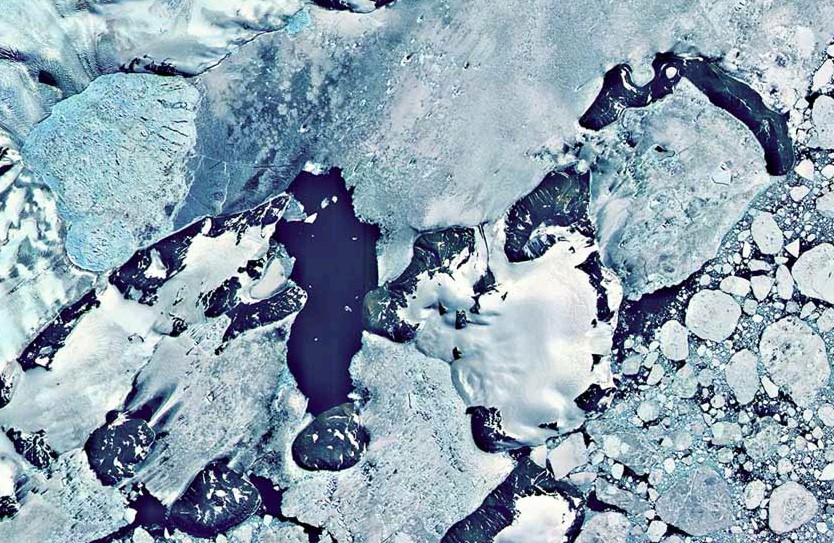 |
Abb. 2.2.19b: SPOT-XS (4) Aufnahme aus der Antarktis (SPOT) |
JERS-1 oben
Japanischer miltispektral Satellit mit SAR (1992)
Sensoren:
- Optischer Photo-Scanner (OPS) und Synthetisches Apertur Radar (SAR)
- 7 (OPS) bzw. 1 Kanal (SAR)
Stereomöglichkeit in Kanal 4 (NIR), bei 15,3 °
Kanal OPS |
Wellenlänge |
Pixelgröße |
|
1 |
520-600 nm |
18 m x 24 m |
|
2 |
630-690 nm |
s.o. |
|
3 |
760-960 nm |
s.o. |
|
| 4 (3) | 760-960 nm | 15,3°; stereo | |
| 5-7* | SWIR | s.o. | |
| SAR | 1,3 GHz | 18 m x 18 m | |
| Polarität | HH | L-Band |
(* momentan nicht funktionsfähig)
Orbit:
- Sonnensynchroner, polnaher Orbit
- Flughöhe 570 km
- Umlaufperiode ca. 100 Minuten
- Wiederholzyklus 44 Tage
- Bildgröße ca. 75 km x 75 km
- SAR Depressionswinkel 35°
Anwendungen:
- Glaziologie
- Geographie
- Geologie
- Landschaftsökologie
- Land- und Forstwirtschaft
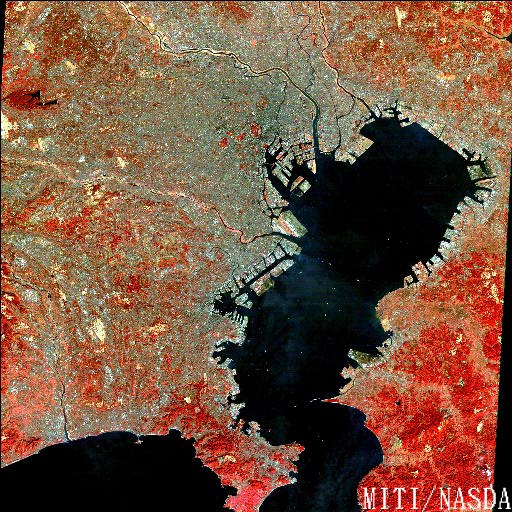 |
Abb. 2.2.20: JERS-OPS IR-Aufnahme Tokio (NASDA) |
 |
Abb. 2.2.21: JERS-SAR Aufnahme Nakashi-Wan (NASDA) |
QUICKBIRD oben
Amerikanischer Erderkundungssatellit von 2001 bis heute.
Charakteristika:
 |
Quickbird Produkte:
Panchromatic Products
QuickBird panchromatic (black and white) products are based on 61-centimeter resolution (at nadir) and 11-bit collected information depth. The panchromatic sensor collects information at the visible and near-infrared wavelengths and has a bandwidth of 450-900 nm. The output resolution of the Panchromatic product varies with product level. Basic Imagery is delivered at the Ground Sample Distance in which the data were collected (ranging from 61 cm at nadir to 72 cm at 25° off-nadir), while Standard and Ortho Imagery products are resampled to a 60 or 70 cm resolution.
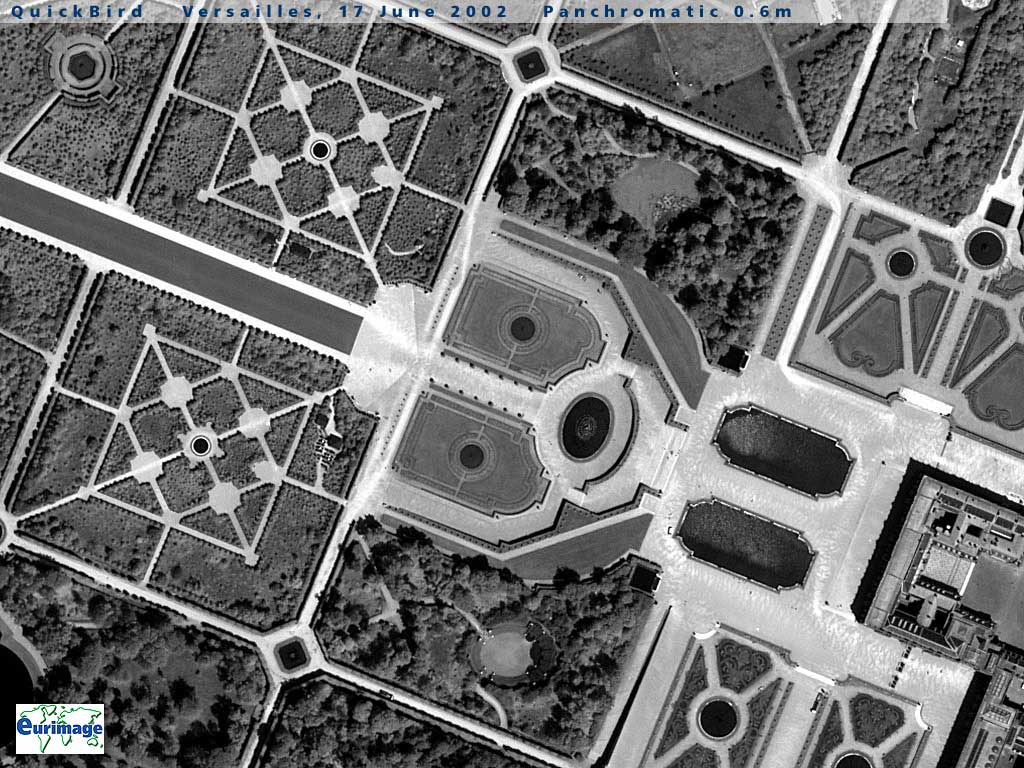 |
Abb. 2.2.22: QUICKBIRD panchro- matische Aufnahme (Eurimage, 2003) |
Multi-spectral Products
QuickBird multi-spectral products provide four discrete non-overlapping spectral bands and 11-bit collected information depth. The multi-spectral products cover the visible and near-infrared wavelengths in four bands. All four bands are delivered in one file. The output resolution of the Panchromatic product varies with product level. Basic Imagery products are delivered at the resolution in which the data were collected (ranging from 2.44 m to 2.88 m), while Standard and Ortho Imagery products are resampled to a 2.4 or 2.8 m pixel spacing.
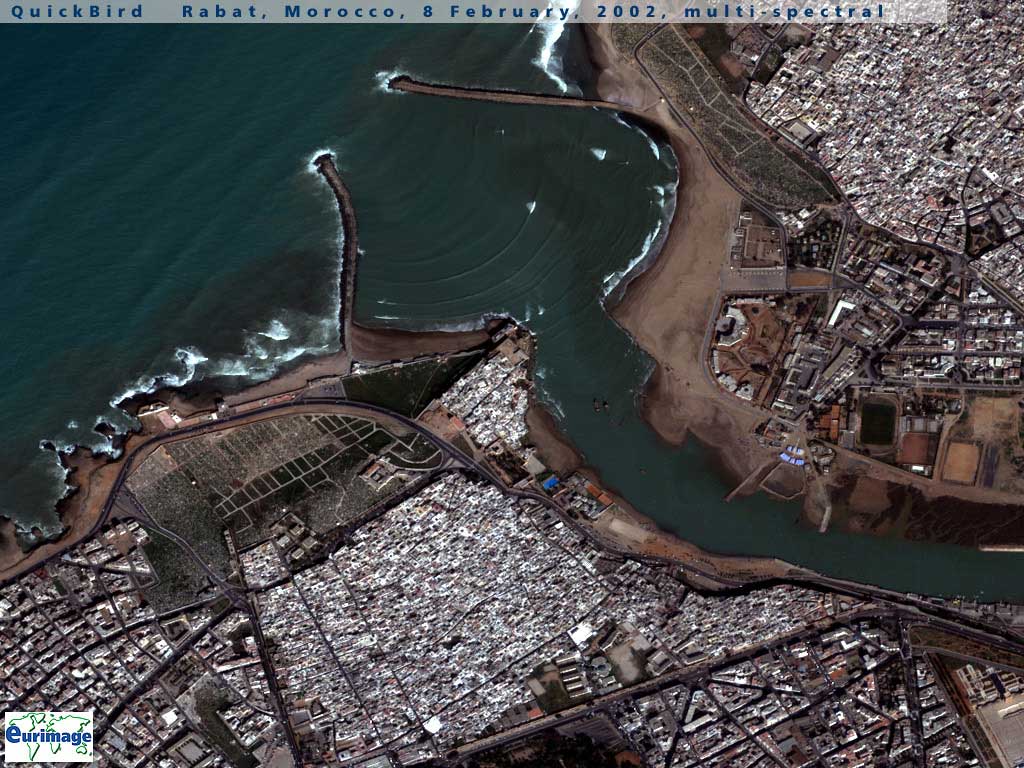 |
Abb. 2.2.23: QUICKBIRD multispektrale Aufnahme (Eurimage, 2003) |
Panchromatic and Multi-spectral Bundle
The QuickBird satellite collects both multi-spectral and panchromatic imagery concurrently, therefore customers have the option to order both panchromatic and multi-spectral products for the same area. When a customer selects this option, the products will be processed to the same product level, the same product parameters, and delivered as two distinct products (one containing panchromatic imagery and one containing all four multi-spectral bands) with two sets of associated Image Support Data (ISD) files. Pan-Sharpened Colour Products 60 or 70-centimeter Pan-sharpened products, combine the visual information of the 2.4/2.8-meter multi-spectral bands with the spatial information of the panchromatic band. The options are: 4 Bands (B, G, R, NIR) Natural Colour composite ( blue, green, red) Colour Infrared composite (green, red, infrared) Pan-sharpened Colour products are delivered as a single file. They are available only as Standard or Ortho (not Basic) Imagery products. Pan sharpened products are available only from imagery acquired after 9 April, 2002.
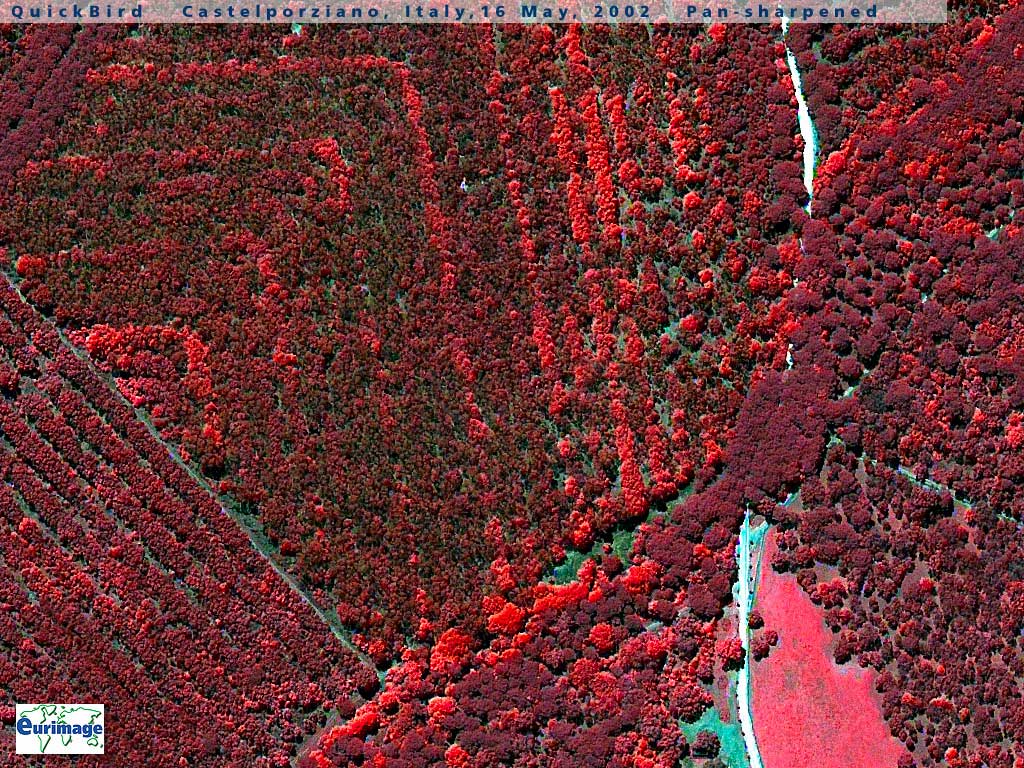 |
Abb. 2.2.24: QUICKBIRD pansharpened, multispektrale Aufnahme (Eurimage, 2003) |
ASTER oben
(Advanced Spaceborne Thermal Emission and Reflection Radiometer) ist ein Sensor, der auf dem Satelliten Terra seit Dezember 1999 fliegt. Er ist Teil des NASA Earth Observing System (EOS) Earth Remote Sensing Data Analysis Center (ERSDAC) . ASTER sammelt Daten zum Zwecke von Karten, Temperaturverteilung, Emissivität, Reflektion und Höhenverteilung (...The EOS platforms are part of NASA's Earth Science Enterprise, whose goal is to obtain a better understanding of the interactions between the biosphere, hydrosphere, lithosphere and atmosphere....)
Charakteristika:
Characteristic |
VNIR |
SWIR |
TIR | |
| Spectral Range | Band 1: 0.52 - 0.60 µm Nadir looking |
Band 4: 1.600 - 1.700 µm | Band 10: 8.125 - 8.475 µm | |
| Band 2: 0.63 - 0.69 µm Nadir looking |
Band 5: 2.145 - 2.185 µm | Band 11: 8.475 - 8.825 µm | ||
| Band 3: 0.76 - 0.86 µm Nadir looking |
Band 6: 2.185 - 2.225 µm | Band 12: 8.925 - 9.275 µm | ||
| Band 3: 0.76 - 0.86 µm Backward looking |
Band 7: 2.235 - 2.285 µm | Band 13: 10.25 - 10.95 µm | ||
| Band 8: 2.295 - 2.365 µm | Band 14: 10.95 - 11.65 µm | |||
| Band 9: 2.360 - 2.430 µm | ||||
| Ground Resolution | 15 m | 30m | 90m | |
| Data Rate (Mbits/sec) | 62 | 23 | 4.2 | |
| Cross-track Pointing (deg.) | ±24 | ±8.55 | ±8.55 | |
| Cross-track Pointing (km) | ±318 | ±116 | ±116 | |
| Swath Width (km) | 60 | 60 | 60 | |
| Detector Type | Si | PtSi-Si | HgCdTe | |
| Quantization (bits) | 8 | 8 | 12 | |
| System Response Function | VNIR Chart VNIR Data |
SWIR Chart
SWIR Data |
TIR Chart TIR Data |
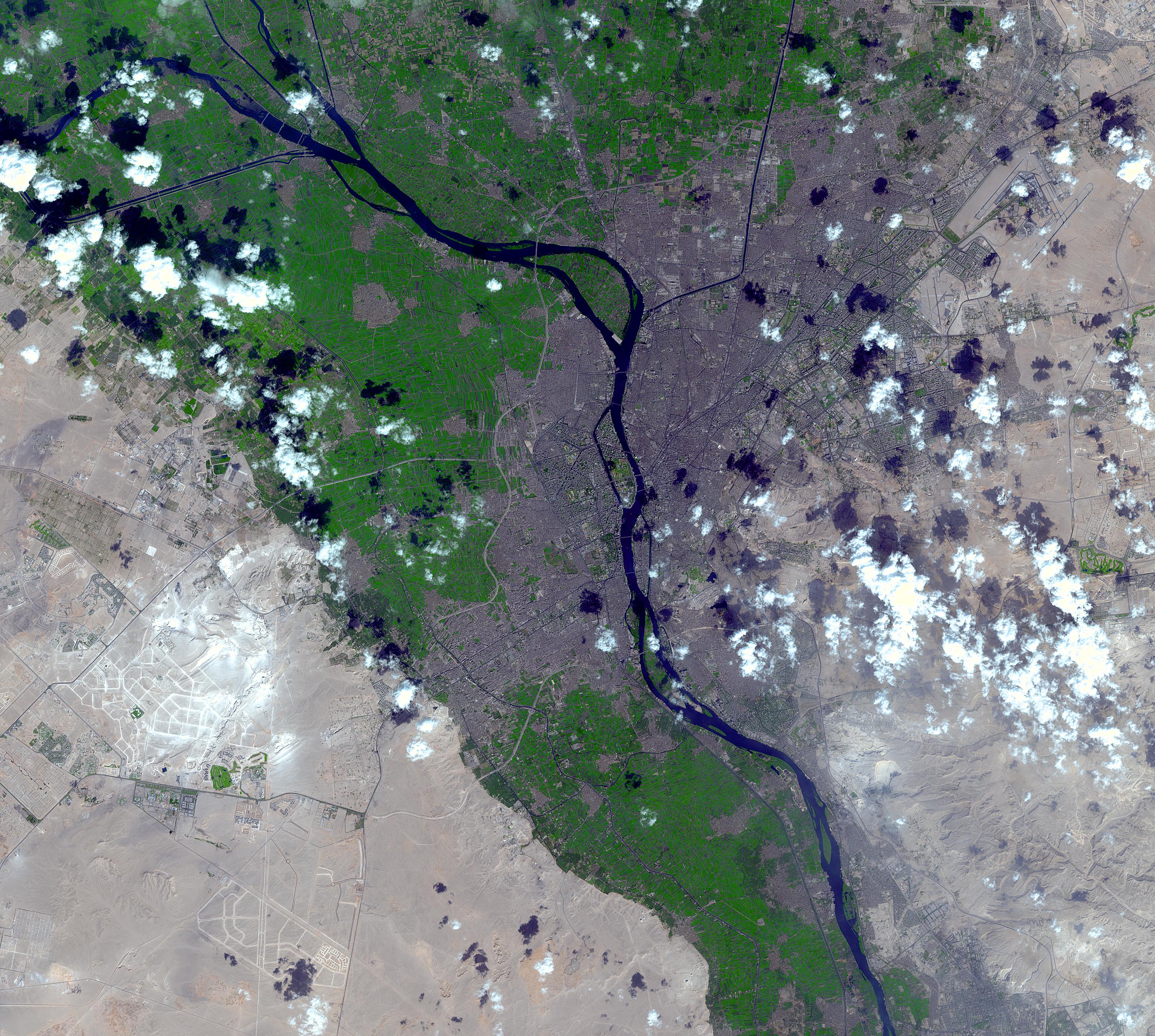 |
Abb. 2.2.25: ASTER multi- spektrale IR-Farb- aufnahme, Kairo, 15m/Pixel (ASTER, 2003) |
SENTINAL Satellitenverbund der ESA
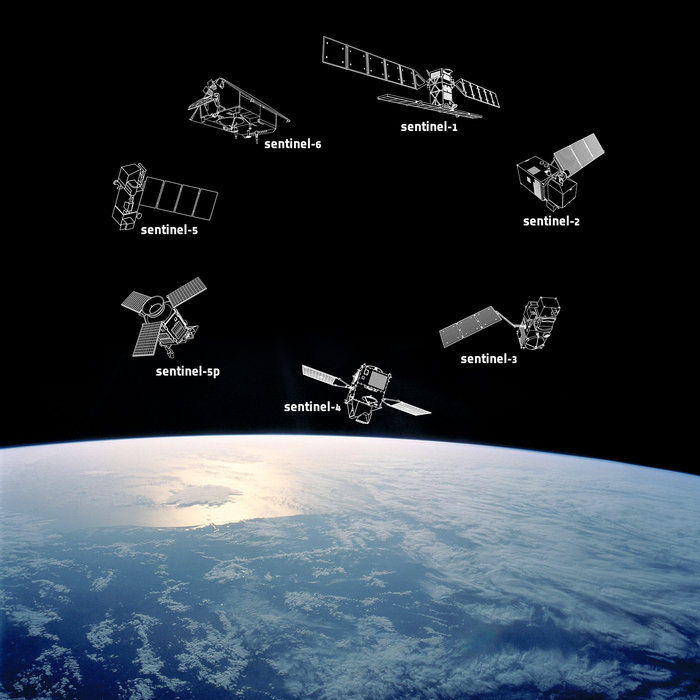
Die Sentinel-Satelliten der ESA stellen ein Verbundsystem aus verschiedenen, sich aber ergänzenden Erdbeobachtungssatelliten des Copernicus-Programms der ESA dar. Seit 2014 werden die Satelliten sukkzessive von der ESA bereitgestellt. Es handelt sich dabei um
Sentinel-1, ein Radarsatelliten-Paar, Sentinel-2, ein Paar von passiv-optischen Erdbeobachtungssatelliten und Sentinel-3, ein Paar von Satelliten mit Sensoren zur Messung der Meeresoberflächentopographie, der Temperatur von Meeres- und Landoberflächen und der Ozeanfarbe. Sentinel-5/P untersucht seit 2017 die Atmosphäre der Erde; ab 2019 werden Sentinel-4 und -5 bzw. 6 meteorologischer Untersuchungen durchführen.
Eine Besonderheit der Sentinal Mission sind die raschen zeitlichen Wiederholraten von Aufnahmen, die hohe spektrale Vielfalt der Sensoren und die prinzipiell freie (!) Zugänglichkeit aller Daten der Mission! Sentinal Daten werden bereits jetzt in vielen aktuellen geowissenschaftlichen Langzeitstudien, insbesondere im Hinblick auf globale Umweltphänomene bzw. regionale Monitoringprozesse genutzt.
-
Sentinel-1 is a polar-orbiting, all-weather, day-and-night radar imaging mission for land and ocean services. Sentinel-1A was launched on 3 April 2014 and Sentinel-1B on 25 April 2016. Both were taken into orbit on a Soyuz rocket from Europe's Spaceport in French Guiana.
-
Sentinel-2 is a polar-orbiting, multispectral high-resolution imaging mission for land monitoring to provide, for example, imagery of vegetation, soil and water cover, inland waterways and coastal areas. Sentinel-2 can also deliver information for emergency services. Sentinel-2A was launched on 23 June 2015 and Sentinel-2B followed on 7 March 2017.
-
Sentinel-3 is a multi-instrument mission to measure sea-surface topography, sea- and land-surface temperature, ocean colour and land colour with high-end accuracy and reliability. The mission will support ocean forecasting systems, as well as environmental and climate monitoring. Sentinel-3A was launched on 16 February 2016 and Sentinel-3B will join its twin in orbit on 25 April 2018.
-
Sentinel-5 Precursor – also known as Sentinel-5P – is the forerunner of Sentinel-5 to provide timely data on a multitude of trace gases and aerosols affecting air quality and climate. It has been developed to reduce data gaps between the Envisat satellite – in particular the Sciamachy instrument – and the launch of Sentinel-5. Sentinel-5P was taken into orbit on a Rockot launcher from the Plesetsk Cosmodrome in northern Russia on 13 October 2017.
-
Sentinel-4 is a payload devoted to atmospheric monitoring that will be embarked upon a Meteosat Third Generation-Sounder (MTG-S) satellite in geostationary orbit.
-
Sentinel-5 is a payload that will monitor the atmosphere from polar orbit aboard a MetOp Second Generation satellite.
-
Sentinel-6 carries a radar altimeter to measure global sea-surface height, primarily for operational oceanography and for climate studies.
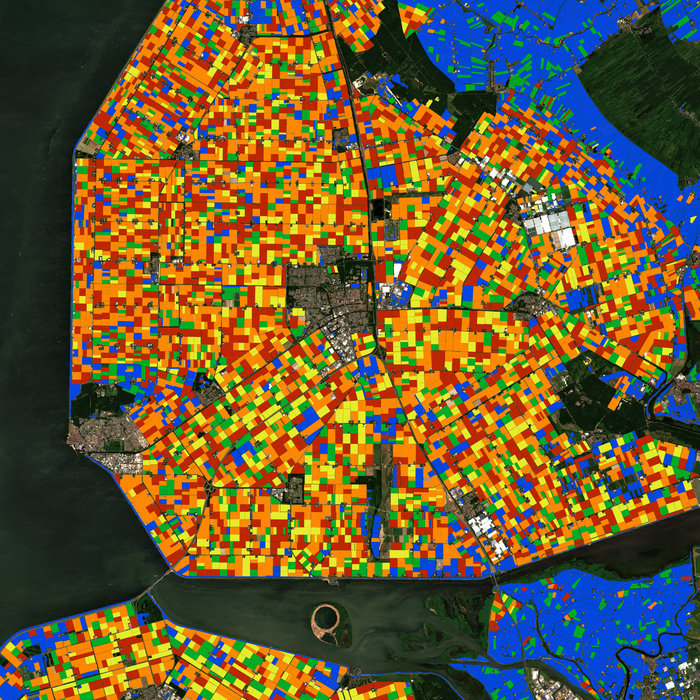
Klassifikation von Sentinal-Landnutzungsdaten für eine Polderfläche in den Niederlanden (ESA, 2019).
MODIS (Moderate Resolution Imaging Spectroradiometer) oben
Amerikanischer Erderkundungssatellit, von 2001 bis heute. auf Terra-Satelliten fliegend, vgl. o.)
Charateristika:
Characteristic |
VNIR |
|
| Orbit | 705 km, 10:30 a.m. descending node (Terra) or 1:30 p.m. ascending node (Aqua), sun-synchronous, near-polar, circular | |
| Scan Rate | 20.3 rpm, cross track | |
| Swath Dimensions | 2330 km (cross track) by 10 km (along track at nadir) | |
| Telescope | 17.78 cm diam. off-axis, afocal (collimated), with intermediate field stop | |
| Size | 1.0 x 1.6 x 1.0 m | |
| Weight | 228.7 kg | |
| Power | 162.5 W (single orbit average) | |
| Data Rate | 10.6 Mbps (peak daytime); 6.1 Mbps (orbital average) | |
| Quantization | 12 bits | |
| Spatial | 250 m (bands 1-2) | |
| Resolution | 500 m (bands 3-7) 1000 m (bands 8-36) |
|
| Design Life | 6 years |
Primary Use |
Band |
Bandwidth1 | Spectral Radiance2 | Required SN3 | |
| Land/Cloud/Aerosols Boundaries |
1 | 620 - 670 | 21.8 | 128 | |
| 2 | 841 - 876 | 24.7 | 201 | ||
| Land/Cloud/Aerosols Properties |
3 | 459 - 479 | 35.3 | 243 | |
| 4 | 545 - 565 | 29.0 | 228 | ||
| 5 | 1230 - 1250 | 5.4 | 74 | ||
| 6 | 1628 - 1652 | 7.3 | 275 | ||
| 7 | 2105 - 2155 | 1.0 | 110 | ||
| Ocean Color/ Phytoplankton/ Biogeochemistry |
8 | 405 - 420 | 44.9 | 880 | |
| 9 | 438 - 448 | 41.9 | 838 | ||
| 10 | 483 - 493 | 32.1 | 802 | ||
| 11 | 526 - 536 | 27.9 | 754 | ||
| 12 | 546 - 556 | 21.0 | 750 | ||
| 13 | 662 - 672 | 9.5 | 910 | ||
| 14 | 673 - 683 | 8.7 | 1087 | ||
| 15 | 743 - 753 | 10.2 | 586 | ||
| 16 | 862 - 877 | 6.2 | 516 | ||
| Atmospheric Water Vapor |
17 | 890 - 920 | 10.0 | 167 | |
| 18 | 931 - 941 | 3.6 | 57 | ||
| 19 | 915 - 965 | 15.0 | 250 | ||
| Primary Use | Band | Bandwidth1 | Spectral Radiance2 | Required NE[delta]T(K)4 | |
| Surface/Cloud Temperature |
20 | 3.660 - 3.840 | 0.45(300K) | 0.05 | |
| 21 | 3.929 - 3.989 | 2.38(335K) | 2.00 | ||
| 22 | 3.929 - 3.989 | 0.67(300K) | 0.07 | ||
| 23 | 4.020 - 4.080 | 0.79(300K) | 0.07 | ||
| Atmospheric Temperature |
24 | 4.433 - 4.498 | 0.17(250K) | 0.25 | |
| 25 | 4.482 - 4.549 | 0.59(275K) | 0.25 | ||
| Cirrus Clouds Water Vapor |
26 | 1.360 - 1.390 | 6.00 | 150(SNR) | |
| 27 | 6.535 - 6.895 | 1.16(240K) | 0.25 | ||
| 28 | 7.175 - 7.475 | 2.18(250K) | 0.25 | ||
| Cloud Properties | 29 | 8.400 - 8.700 | 9.58(300K) | 0.05 | |
| Ozone | 30 | 9.580 - 9.880 | 3.69(250K) | 0.25 | |
| Surface/Cloud Temperature |
31 | 10.780 - 11.280 | 9.55(300K) | 0.05 | |
| 32 | 11.770 - 12.270 | 8.94(300K) | 0.05 | ||
| Cloud Top Altitude |
33 | 13.185 - 13.485 | 4.52(260K) | 0.25 | |
| 34 | 13.485 - 13.785 | 3.76(250K) | 0.25 | ||
| 35 | 13.785 - 14.085 | 3.11(240K) | 0.25 | ||
| 36 | 14.085 - 14.385 | 2.08(220K) | 0.35 | ||
| 1 Bands 1 to 19 are in nm; Bands 20 to 36 are in µm 2 Spectral Radiance values are (W/m2 -µm-sr) 3 SNR = Signal-to-noise ratio 4 NE(delta)T = Noise-equivalent temperature difference |
|||||
| Note: Performance goal is 30-40% better than required | |||||
Components
The MODIS instrument has been designed and developed during the past 10 years. The Engineering Model (EM) was completed in mid-1995. Since then, the first spaceflight unit, the Protoflight Model (PFM) (Fig. 1) has been completed and launched onboard the EOS satellite Terra on December 18th, 1999. Another MODIS (Flight Model 1, or FM-1) has been developed and is undergoing testing to be part of the EOS satellite Aqua, scheduled for launch in July 2001. The MODIS instruments — built to NASA specifications by Santa Barbara Remote Sensing — represent the finest in engineering of spaceflight hardware for remote sensing.
The MODIS instrument was designed with the following subsystems and abilities. Follow the highlighted links for more technical descriptions of each subsystem. Also below is a technical discussion of the MODIS Design concept.
- Atmospheric, land, and ocean imaging in a single instrument
- 1,000-m, 500-m, and 250-m resolution spectral bands
- Custom-tailored spectral bands from 0.4 to 14.4 µm; low out-of-band response
- Opto-Mechanical System
- Mainframe
- Continuously rotating double-sided Scan Mirror Assembly for long life
- Passive Radiative Cooler
- Advanced Focal Plane Assembly (FPA) technology for unsurpassed sensitivity
- Optical Bench Assembly
- Optical System Description
- Door Assemblies
- Electronics System
- Space-Viewing Analog Module
- Forward-Viewing Analog Module
- Main Electronics Module (MEM)
- On-Board Calibration System
- IR calibration every scan for low 1/f noise and high accuracy
- Low ghosting, low scatter optics
- On-board Solar Diffuser and Solar Diffuser Stability Monitor (SDSM)
- On-board full-aperture Blackbody (BB)
- On-board Spectroradiometric Calibration Assembly (SRCA)
 |
Abb. 2.2.26: MODIS multispektrale Echtfarbaufnahme, Hawaii, 250m/Pixel (EOSAT, 2003) |
|
IRS-P6 Resourcesat-1 has been successfully launched into polar orbit on October 17, 2003 from Satish Dhawan Space Centre by the Indian PSLV-C5. ISRO's Spacecraft Control Centre at Bangalore now commands IRS-P6. |

Key Parameters of the IRS-P6 Sensors
| LISS-IV | LISS-III | AWiFS | |||
|---|---|---|---|---|---|
| Mono Mode | MX Mode | ||||
| Spatial Resolution | Band 2 (green) Band 3 (red) Band 4 (NIR) Band 5 (SWIR) |
5.8 m |
5.8 m 5.8 m 5.8 m |
23.5 m 23.5 m 23.5 m 23.5 m |
56 m ... 70 m 56 m ... 70 m 56 m ... 70 m 56 m ... 70 m |
| Swath-width | all Bands | 70 km | 23.9 km | 140 km | 740 km |
| Radiometric Resolution, Quantisation | all Bands | 7 bit | 7 bit | 7 bit | 10 bit |
| Spectral Coverage | Band 2 (green) Band 3 (red) Band 4 (NIR) Band 5 (SWIR) |
620-680 nm |
520-590 nm 620-680 nm 770-860 nm |
520-590 nm 620-680 nm 770-860 nm 1550-1700 nm |
520-590 nm 620-680 nm 770-860 nm 1550-1700 nm |
| Focal Length | Band 2 (green) Band 3 (red) Band 4 (NIR) Band 5 (SWIR) |
982.40 mm |
983.12 mm 982.40 mm 981.90 mm |
347.520 mm 347.508 mm 347.495 mm 451.631 mm |
139.530 mm 139.530 mm 139.530 mm 181.355 mm |
| CCD Arrays (number of arrays * no. of elements) |
Band 2 (green) Band 3 (red) Band 4 (NIR) Band 5 (SWIR) |
1 * 12000 |
1 * 12000 1 * 12000 1 * 12000 |
1 * 6000 1 * 6000 1 * 6000 1 * 6000 |
2 * 6000 2 * 6000 2 * 6000 2 * 6000 |
| CCD Size | Band 2 (green) Band 3 (red) Band 4 (NIR) Band 5 (SWIR) |
7 µm x 7 µm |
7 µm x 7 µm 7 µm x 7 µm 7 µm x 7 µm |
10 µm x 7 µm 10 µm x 7 µm 10 µm x 7 µm 13 µm x 13 µm |
10 µm x 7 µm 10 µm x 7 µm 10 µm x 7 µm 13 µm x 13 µm |
| Integration Time | all Bands | 0.8782745 ms | 0.8782745 ms | 3.3194962 ms | 9.9584885 ms |
| Cross Track Field of View (FOV) for Single Pixel (radiant) | all Bands | 0.0000071 | 0.0000071 | 0.0000288 | 0.0000717 |
Note: The LISS-IV camera can be operated either in monochromatic or multispectral mode.
IRS Cartosat-2

The Indian Remote Sensing Satellite IRS Cartosat-2 has been successfully launched into polar orbit on January 10, 2007. The payload was lifted by the PSLV-C7 from the Satish Dhawan Space Centre, Sriharikota.
Cartosat-2 is highly agile and can be operated in different imaging modes. E.g. in spot mode, imaging in North-South direction on either side of the track, in paint-brush mode, employing roll and pitch tilt to increase the total swath, and in multi-view mode, imaging one strip three times with different look angles.
Key Parameters of the Cartosat-2 Sensor
| System | PAN |
|---|---|
Tilt Across Track |
± 45 deg |
Tilt Along Track |
± 45 deg |
Spatial Resolution |
<1 m |
Swath-width |
9.6 km |
Radiometric Resolution, Quantisation |
10 bit |
Spectral Coverage |
500-850 nm |
CCD Arrays (no. of arrays * no. of elements) |
1 * 12000 |
RRapidEye
The Jena-Optronik multi-spectral imager, the Jena Spaceborne Scanner JSS 56, is a pushbroom sensor carried on each RapidEye Satellite. Each sensor is capable of collecting image data in five distinct bands of the electromagnetic spectrum; Blue, Green, Red, Red-Edge and Near-Infrared - at a daily revisit time (off nadir).
RapidEye's satellites will be the first commercial satellites to include the Red-Edge band, which is sensitive to changes in chlorophyll content. More research will be necessary to realize the full potential of the Red-Edge band, however, preliminary studies show that this band can assist in monitoring vegetation health, improve species separation and help in measuring protein and nitrogen content in biomass.
Sensor Performance Specifications:
| Pixel spacing | 6.5 m at nadir. Native camera pixel spacing. |
| Bit Depth | 16-bit unsigned integers |
| Spectral Bands |  Blue: 440-510 nm Blue: 440-510 nmGreen: 520-590 nm Red: 630-685 nm Red Edge: 690-730 nm NIR: 760-850 nm |
| Product Size | Approximately 77 km wide with a variable length of between 50 km and 300 km
462 Mbytes/25 km along track for 5 bands. Maximum 5544 Mbytes. |
| Geometric Corrections | Idealized sensor, orbit and attitude models. Bands are co-registered. |
| Horizontal Datum | WGS84 |
Rio de Janeiro (CIR, RapidEye)
EnMAP (2017/2020) - Environmental Mapping and Analysis Program
German hyperspectral satellite mission with 200 channels within the broad spectral range from 420 nm to 2450 nm and high ground resolution of 30 m.
Global determination of ecosystem parameters as well as biophysical, biochemical and geochemical variables. Analysis capability for post natural disasters and environmental pollution of land and water. Mission data will be used for the preparation of future commercialization and operative services.
Realization under German leadership with international partners (see ENMAP homepage).
Mission Parameter for EnMAP |
||
| Orbit | ||
| : | at 643 km | |
| : | 97.96° | |
| Ground Resolution | : | 30 x 30m |
| Imaging concept | : | “push-broom” with 30 km swath width, pointing feature ±30° |
| Target revisit time (pointing angle) |
: | < 4 days (±30°), 23 days (±5°) |
| Minimum ground coverage/d | : | 5.000 km x 30 km |
| Data storage capacity | : | 512 Gbit |
| Data downlink rate | : | 100 to 300 Mbps via X-Band |
| Instrument Mass | : | < 200 kg |
| Power consumption instrument | : | < 200 W |
| Channels/Bands | ||
| : | 420 – 1030 nm (96 bands) | |
| : | 950 – 2450 nm (122 bands) | |
| Satellite total mass | : | 766 kg |
| Satellite attitude | ||
| : | better than 500 m | |
| : | better than 100 m | |
| Life time | : | 5 years |
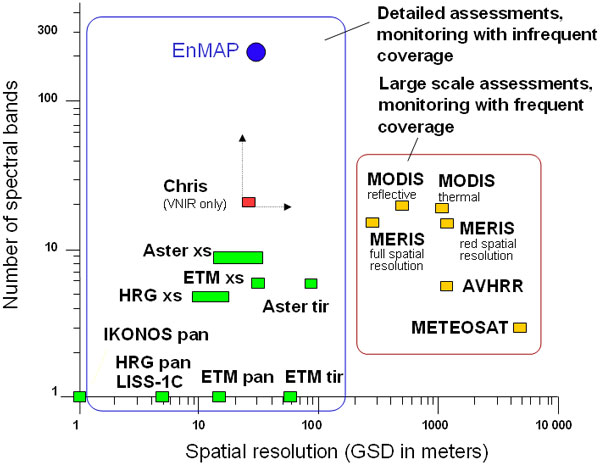
Mission Performance
The Figure (below) shows EnMAP characterized by high resolution and the number of spectral bands compared to other multi- and hyperspectral systems. EnMAP enables the retrieval of hyperspectral data with high spectral and spatial resolution with a simultaneously high repitition rate. EnMAP is consequently outstanding to all existing similar satellite systems due to its performance.