
1.3 Global Positioning System
In Kapitel 1.2 wurden bereits einige wichtige historisch-technische
Entwicklungen skizziert, die als wesentliche Grundlagen in die Umsetzung der GPS- bzw. differenziell (DGPS-)
betriebenen Navigationsysteme eingeflossen sind. Aus den Erfahrungen mit TRANSIT/NAVSTAR hatte man schnell den
zwingenden Bedarf eines wesentlich erweiterten Satellitenkontingentes für die weltweit verfügbare
GPS-Technik erkannt. TRANSIT bot mit sechs Satelliten eine nur stark eingeschränkte Verfügbarkeit, da nur zu
wenigen Augenblicken optimale Konstellationen von drei bzw. vier Satelliten zur exakten, dreidimesionalen
Positionsbestimmung gegeben waren. Eine derartige Positionsbestimmung war mittels der alten Systeme nicht weltweit
durchfürbar.
Um eine kontinuierliche globale Abdeckung mit Satelliten zu erreichen, wurde ein Orbit-System berechnet, welches an jedem Punkt der Erde mindestes vier Satelliten für die exakte GPS-Positionsbestimmung zu jeder Tages- und Nachtzeit gewährleistet. Für eine Mindestumsetzung des GPS-Konzeptes wurden 24 Satelliten geplant, welche in einem 12-stündigen Kreisorbital in 20.200 km Höhe mit 55° Inklination zur Äquartorebene die Erde in Vierergruppen pro Orbit gleichverteilt umkreisen (die Orbits sind gegeneinander um 60° geneigt). Man bezeichnet die 21 ständig aktiven Satelliten als Block II- , die Mindestreservesatelliten (drei, heute acht!) als Block IIA-Typen.
Die Übertragungsfrequenzen für die Positionsdaten liegen bei L1 = 1575,42 (C/A-Code, P-Code) und L2 = 1227,6 MHz (P-Code). Beide Trägerfrequenzen werden in einem zufälligen Impulscode dem PRN-Code moduliert ( Pseudo Random Noise Code ) und stehen für militärische (P-Code) bzw. zivile (C/A-Code) Nutzungen zur Verfügung (vgl. Kap. 2.3). Die Master Control Station der Satelliten befindet sich in Colorado Springs, USA.
Prinzipiell erhöht jeder zusätzlich 'sichtbare' Satellit die momentane Positionierungsqualität erheblich, da auf der Erde lokal auch mit ungünstigen topographischen Verhältnissen gerechnet werden muß, welche während der terrestrischen GPS-Messungen zur Abschattung einer oder mehrerer der vier zwingend erforderlichen Satelliten führen kann.
Ursprünglich sollte das Gesamtsystem 1989/90 voll ausgebaut sein, ihm wurde jedoch erst 1994 (bedingt durch den hohen finanziellen Aufwand so wie einiger technische Rückschläge, wie z.B. der Challenger -Explosion) von dem DOD (Dept. Of Defence) eine vorläufige Betriebsfähigkeit bescheinigt. Allerdings ließ sich schon 1990 im ausreichenden Umfang mit den GPS-Daten auf See navigieren (fehlende topographische Hindernisse!.) Damals nahm die US-Küstenwache das System in ihre Standardausrüstung zur Navigationsunterstützung von Schiffen innerhalb der US-Hoheitsgewässer auf. Am 17. Juli 1995 wurde offiziell die endgültige Betriebsbereitschaft erklärt. 1997 befanden sich bereits 26 Satelliten im Orbit, so daß man (je nach lokalen Bedingungen) meist deutlich mehr als 4 Satelliten (durchschnittlich etwa 5-8) mit ausreichender Signalqualität zur Positionsberechnung empfangen konnte. Diese hohe Anzahl von Trabanten erlaubt eine zuverlässige Messung von geographischer Länge, Breite, Höhe, Geschwindigkeit, Richtung der Bewegung und speziellerer Parameter (Abb. 1.3.1).
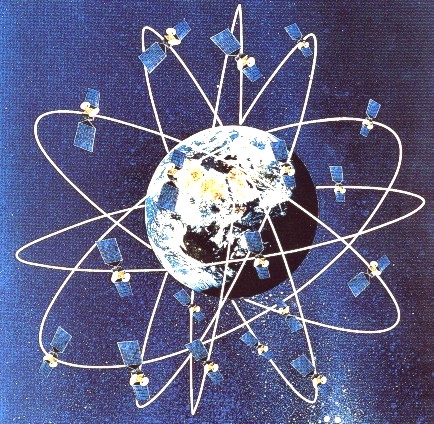
Abb. 1.3.1: Schematische Darstellung der GPS-Satellitenorbits zur Gewährleistung einer weltweiten Abdeckung von GPS-Signalen. Auf jedem Orbit befinden sich vier Satelliten (Kumm, 1997)
Mitte der Neunziger Jahre gab man das ursprünglich rein militärisch ausgerichtete GPS-Satellitensystem in einer modifizierten Form (C/A-Code) auch für die zivile Nutzung frei, da die Planunungs- und Betriebskosten des Gesamtsystems so stark angestiegen waren, daß sie politisch im Hinblick auf eine rein militärische Nutzung nicht mehr vertretbar waren. Diesem Umstand verdanken alle nicht-militärischen Nutzer die weltweit freie Verfügbarkeit des zivilen Signals (C/A Code = coarse acquisition) zur Positionsbestimmung. Der hochauflösende Präzisionscode (P-Code) bleibt weiterhin der militärischen Nutzung vorbehalten und kann nur von militärischen Empfängern verarbeitet werden (vgl. Kap. 2.3).
Das Grundprinzip der GPS-Navigation
Bevor in späteren Kapiteln auf die wichtigen Details und Möglichkeiten des GPS-Systems eingegangen wird, soll an dieser Stelle ein kurzer allgemeiner Abriß der Grundprinzipien des GPS-Messung und der daraus abgeleiteten Ortsbestimmung erfolgen, da ihr Verständnis weitere Betrachtungen im Praktikum erleichtern:
Das GPS-System ist so konzipiert, daß eine Positionsbestimmung in x-, y- und z-Richtung (Punktbestimmung) überall auf der Erde jederzeit möglich ist. Die Position wird aus der Messung von Laufzeiten der (unterschiedlich codierten) Signale des Satelliten zum GPS-Empfänger abgeleitet. Es handelt sich also prinzipell um eine Messung der Distanzen zwischen GPS-Empfänger und Satelliten.
Stellt man sich die Positionen der Satelliten zu einem bestimmten Zeitpunkt im All eingefroren vor, kann ihre exakte stellare Position durch die Ephemeriden des Orbits bestimmt werden. Wenn die von ihnen ausgesandten Signale (sog. Almanachdaten) vom GPS-Empfänger aufgenommen werden, haben diese eine unterschiedlich lange Laufzeit hinter sich, aus denen die Distanz zu den jeweiligen Satelliten abgeleitet werden kann. Parallel dazu erzeugt der Empfänger selber ein Signal gleicher Kennung und synchronisiert dieses mit den empfangenen Informationen. Voraussetzung ist die zeitliche Gleichschaltung der Satelliten und des Empfängers. Die abgeleitete Phasenverschiebung führt zu einer weiteren zeitlichen Korrekturkomponente, welche in die Berechnungen der Laufzeiten einfließen.
Betrachtet man nur einen einzelnen Satelliten, so zeichnet das ausgesandte Signal eine Kugelsphäre um den Satelliten herum nach, auf dessen Oberfläche das Signal gleichzeitig empfangen werden kann (engl.: range). Analog zur terrestrischen Navigation könnte man hier von eine Standfläche oder, auf die Erdkugel bezogen, von einer kreisförmigen Standlinie 'gleicher Empfangszeiten' sprechen, auf der sich ein Signal mit einer definierten Laufzeit empfangen läßt (Abb. 1.3.2)!
Abb. 1.3.2: Schematische Darstellung einer zeitgleichen, kreisförmigen GPS-Standlinie, gegeben durch ein zeitcodiertes Signal, dessen Ursprung im Orbit über Afrika liegt (Kumm, 1997)
Eine kreisförmige Standlinie macht noch keinen Ort (Position); es kann lediglich davon ausgegangen werden, daß man sich irgendwo auf dieser Linie zum gegebenen Zeitpunkt mit seinem Empfänger befindet. Wird nun simultan ein Signal eines weiteren Satelliten empfangen, kommt eine zweite kreisförmige Standlinie hinzu, welche die mögliche Position theoretisch auf zwei gemeinsame Schnittpunkte mit der ersten Standlinie einschränkt (Abb. 1.3.3).
Abb. 1.3.3: Schematische Darstellung eines Verschnitts zweier kreisförmiger GPS-Standlinien, gegeben durch Signale, deren Ursprünge im Orbit über Afrika und S' von Island liegen. Die unterschiedlichen Kreisdurchmesser beziehen sich auf die unterschiedlichen Laufzeiten der Signale gleicher Zeitkennung (Kumm, 1997)
Die theoretisch endgültige Positionsbestimmung kommt nun über die Einbindung einer dritten Standlinie mit definierter Zeitkennung zustande (Abb. 1.3.4). Grundvoraussetzung ist die absolute Zeitsynchronisation der Satellitenuhren, ihrer Signale und die des GPS-Empfängers(-uhr). Das ausgesandte Signal trägt neben der Orbitinformation (Ephemeriden, Almanachdaten) des Satelliten immer einen Zeitmarker, der es dem Empfänger ermöglicht seine Laufzeit mit anderen Signalen identischer Zeitmarkierung, aber unterschiedlichen Ursprungs zu vergleichen und die Phasenverschiebung zu errechnen. Weiterhin werden die Signale mit der internen Zeitmessung des gesamten GPS-Systems verglichen und auf Verschiebungen analysiert. Hierfür sind die Satelliten mit genauen Atomuhren ausgestattet, während die GPS-Empfänger mit herkömmlichen Quarzuhren auskommen müssen (Platz und Kosten!). In der Praxis ergeben sich hieraus erste Genauigkeitsunterschiede (-fehler) bzgl. der Zeitmessung, welche ihrerseits zu Schwankungen in der Positionsberechnung (Fehlerdreieck) führen (Vgl. Kap. 2.4).
Abb. 1.3.4: Schematische Darstellung eines durch Zeitverschiebung auftretenden Fehlerdreiecks bzgl. einer Position gleicher Zeitkennung und dem durch Korrekturrechnungen theoretisch ermittelten Schnittpunkt der drei kreisförmigen GPS-Standlinien zum endgültigen Standort (Kumm, 1997)
Der Zeitversatz zwischen Sendersignal und GPS-Empfänger wird auch als 'offset' oder 'bias' bezeichnet. Der Offset eines jeden GPS-Empfängers ist apparatetechnisch bedingt (Uhr!) und verursacht eine leichte positive oder negative, aber in jedem Fall fehlerhafte Verschiebung in der Distanzmessung. Letztere kann nur durch die simultane Messung eines vierten Satelliten korrigiert werden, da seine Pseudodistanz (pseudorange) eine Korrektur des Offsets im GPS zuläßt (allerdings kamen zum Offset noch gewollte Fehler der Betreiber, z.B. die SA-Funktion hinzu,(vgl. Kap. 2.3). Zusätzlich erzeugt jeder GPS-Empfänger einen eigenen Signalcode , der den Satellitendaten synchronisiert wird und so weitere Informationen über den vorliegenden Offset liefert.
Insgesamt läßt sich zusammenfassen, daß die Positionsbestimmung mit Hilfe des GPS-Systems über die exakte Bestimmung der Laufzeiten von Signalen zum Empfänger, der daraus abgeleiteten Distanz zu den jeweiligen Satelliten und einer zeitlichen Synchronisation von Empfänger- und Sendersignal bestimmt wird. Je mehr Signalquellen simultan gemessen werden können, desto genauer ist das Ergebnis der Positionierung des Empfängers. Theoretisch sind mindestens drei, praktisch jedoch vier Satelliten zur Berechnung der Position in x-, y- und z-Koordinaten notwendig. Bei momentan 26 + 8 zur Verfügung stehenden GPS-Satelliten ist diese Mindestkonstellation jederzeit global verfügbar. Ausnahmen bilden topographisch sehr ungünstige Gegebenheiten (z.B. Abschattung im Gebirge, dichtes Laubdach, Häuserschluchten...). Die statistische Genauigkeit der Positionierung liegt heute nach Abschaltung der Selective Availability (SA) im zivilen Sektor (C/A-Signal) bei etwa 10 Metern (GPS-Betrieb) bzw. im Zentimeterbereich bei DGPS-Betrieb (Differenzielles GPS); im millitärischen Sektor (P-Code) bei ca. <50 cm (nur GPS-Betrieb).