
Das Georover-Projekt (GeoVessel)
[18.10.10] Im Rahmen des GeoRover-Projektes 2010/11 sind die Studierenden des GPS-Kurses aufgefordert selbständig in vier Gruppen (je 4-6 Personen) einen einfachen, ferngesteuerten Rover zu entwickeln, welcher seine GPS-Koordinaten/Geo-Tracks an eine Basisstation (Laptop) übermittel, die dann wiederum die Track-Geometrien über ein Interface visualsiert (z.B. GoogleEarth oder OpenStreetMap). Die Konzeption, Dokumentation und Realisierung der Einzelprojekte liegt in studentischer Hand und werden durch die jeweiligen Projektgruppen auf dieser Seite nachgehalten.

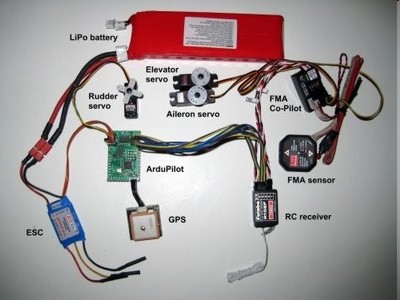
Möglicher Chassis-Rohbau und Steuer-Setup für einen GPS-GeoRover
Auswahl der Grundchassis
Um zeitraubende Eigenkonstruktionen zu vermeiden wurden handelsübliche, einfache RC-Fahrzeuge beschafft (<50.- Euro) - sie dienen als Trägerplattformen für die späteren GeoRover. Steuerung und Stromversorgung der Antriebseinheit bleibt somit autonom und ist (noch) nicht vom GPS abhängig. Die Studierenden haben so Gelegenheit sich ganz auf die mobile Datengenerierung, den Dataflow und die -Auswertung zu konzentrieren.
[25.10.10] Als Grundchassis sind für die Gruppen eigenverantwortlich am Start......
- Monstertruck RTR (oben, Gruppe A)
- 2x Nitropower RTR (mittig, Gruppe B, C)
- Formula 1 SRX 300 (unten, Gruppe D):



Kriterien für den Nitropower
Die Wahl des Fahrzeugs fiel auf einen "R/C Nitro Power" der Firma Dickie. Dieses Auto erscheint besonders geeignet aufgrund guter Werte in den Bereichen Reichweite und Fahrdauer sowie aufgrund des nicht zu hohen Preises. Zusätzlich bietet es mit einer Länge von ca. 30 cm und seiner abgeflachten Ladefläche genug Platz für den Aufbau der elektronischen Zusatzausrüstung. Weiteren Ausschlag für die Entscheidung zu Gunsten dieses Modells gaben die positiven Kundenrezensionen bezüglich der Haltbarkeit und Stabilität des Fahrzeugs.
Technische Parameter
Reichweite: ca. 35 m
Frequenz: 27 MHz
Maßstab: 1:12
Fahrdauer: ca. 40 Minuten
Länge: ca. 30 cm
Geschwindigkeit: ca. 10km/h
Kriterien für den Formula 1
Das Fahrzeug befand sich bereits im Institutsbesitz und verfügt über eine hohe Grundgeschwindigkeit sowie hinreichend Modifikationspotential. Es weist eine genügende Reichweite (ca. 50m) und Betriebsdauer auf. Ein Manko für den Outdoor-Einsatz sind das tief liegende Rennfahrwerk und die Bereifung (Slicks). Auf sauberern Kunstoberflächen (z.B. Tartan, Beton) zeigt es sich aber hochflexibel.
Technische Parameter
Reichweite: ca. 50 m
Frequenz: 27 MHz
Maßstab: 1:10
Fahrdauer: ca. 30 Minuten
Länge: ca. 35 cm
Geschwindigkeit: ca. 15km/h
Kriterien für den Monstertruck RTR
Als Fahrzeug für unseren GeoRover wählten wir den "RC Monstertruck RTR". Dieser Truck bietet zum einen eine ausreichend große Aufbaufläche und zum anderen befindet sich genügend Platz unterhalb des Chassis für weitere technische Komponenten. Die breite Bereifung und das hochgelegte Fahrwerk ermöglichen auch eine Fahrt im unwegsamen Gelände. Ein komplettes Zubehörset macht einen sofortigen Einsatz möglich. Auch die guten Angaben zur Reichweite und Fahrdauer überzeugten.
Technische Parameter
Reichweite: ca. 50 m
Frequenz: 27 MHz
Maßstab: 1:10
Fahrdauer: ca. 12 Minuten
Länge/Breite: ca. 41/21 cm
Geschwindigkeit: ca. 11km/h
Umbau des Chassis Bluetooth
[11.10.10] Um uns einen Überblick zu verschaffen, wie wir das Bluetooth Modul auf dem Fahrzeug montieren zu können, haben wir bei einem ersten Werkstattbesuch das elektronisch betriebene RC Car Nitropower RTR 1 genauer inspiziert. Hierbei wurde die Verkleidung vom Fahrgestell gelöst, um zu sehen, ob eine geeignete Auflagefläche für das Bluetooth Modul vorhaden ist. In einem weiteren Arbeitsschritt konnte dann die Attrappe der orange lackierten Kühlrippen eines Verbrennungsmotors zwecks Gewichtsreduzierung abmontiert werden. Das Gewicht des Fahrzeugs konnte so um 10,2 g gesenkt werden, sodass das Gesamtgewicht des Fahrzeugs ohne Bluetooth Modul nun 905,2 g beträgt.

[29.11.10] Während eines zweiten Werkstattbesuches wurde das Bluetooth-Modul mit Klett-Klebeband längs auf der Abdeckung der Elektronikeinheit befestigt. Zugunsten der Erhaltung von fahrzeugspezifischen Fahreigenschaften wurde eine direkte Montage auf dem Chassi realisiert um den Schwerpunkt des Wagens so niedrig wie möglich zu halten. Um die Antenne des Empfängers freizulegen wurde mit Hilfe eines Konusbohraufsatzes ein Loch in die Verkleidung gebohrt, sodass die Antenne nach deren Montierung seitlich abgewinkelt werden konnte. Einhergehend mit der Montage des Moduls war eine minimale Höherlegung des Wagens unvermeidbar. Die Differenz wurde mit eigens zugesägten Gewindeschrauben kompensiert, sodass die Verkleidung wieder aufgesetzt werden konnte. Bevor die Verkleidung wieder montiert wurde, haben wir den Deckel des Modulkasten abgeschraubt um nicht unnötig den GPS Signalfluss zu behindern. Das durch die Verbrennerattrappe enstandene Loch in der Verkleidung wurde mit Klebeband verschlossen.
Umbau des Chassis xBee (I)
[29.11.10] Um die entsprechenden Komponenten geschützt und dauerhaft auf der Sensorplattform unterbringen zu können, wurden an dem Chassis des RC Car Nitropower RTR 2 diverse Modifikationen vorgenommen. Nach vollständiger Zerlegung des Fahrzeugs wurde entschieden, die Sensor-Box auf dem Grundkorpus anzubringen, allerdings musste dafür eine Ausgleichsplatte eingefügt werden, um Unebenheiten auszugleichen. Die Box wurde mit Klett-Klebepunkten befestigt, um ein einfaches Ablösen des GPS-Moduls zu ermöglichen. Weiterhin wurden vier Gewindestangen als Stützen angebracht, um das Chassis erhöht wieder anbringen zu können um dem größeren Platzbedarf der GPS-Sensor-Box Rechnung zu tragen.
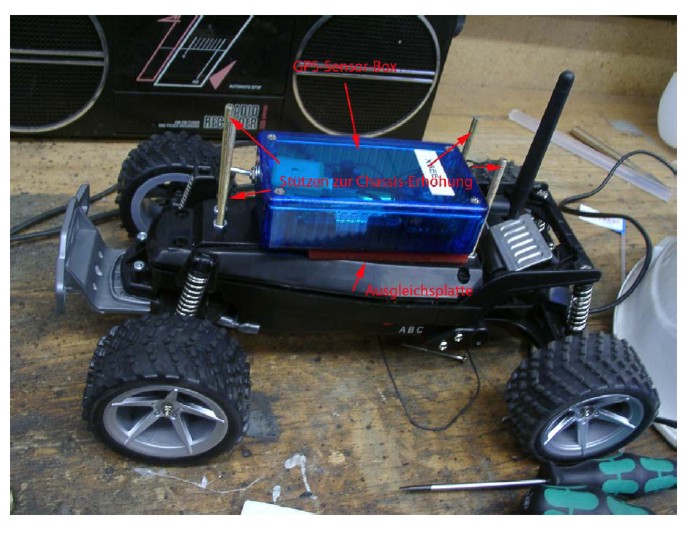
Weiterhin wurde entschieden, den GPS Empfänger zur Verbesserung des Empfangs auf das Dach des Fahrzeugs zu verlegen, zum Schutz vor Witterungseinflüssen wurde daraufhin eine transparente Kunststoffkuppel auf dem Fahrzeug angebracht. Der jetzige Zustand ist jedoch eher als provisorische Lösung zu betrachten, eventuell wird noch eine etwas besser ins Gesamtkonzept des Fahrzeugs passende Abdeckung entwickelt. Weiterhin wurde die Antenne der GPS-Sensor-Box horizontal aus dem Heck des Fahrzeugs geführt.

Datenkommunikation
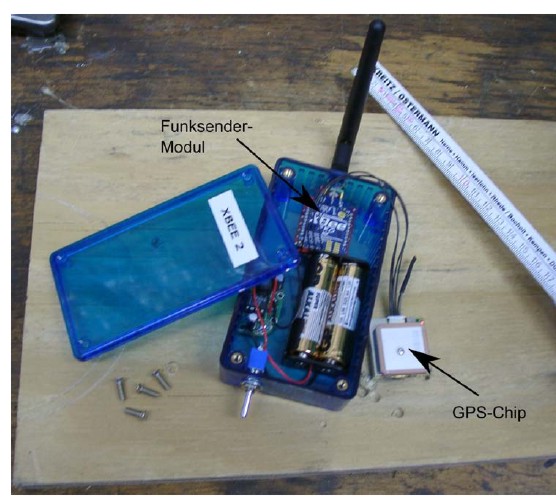
XBee (A,C): Die GPS-Sensor-Box enthält ein XBEE 2-Funksender-Modul (Übertragungsrate 4800bits/sec) mit aufgeschraubter Antenne, einen GPS-SIRF III Chip, sowie die Komponenten für die Stromversorgung. Mit einem eingebauten Schalter kann die Stromversorgung ein- oder ausgeschaltet werden.
In bebautem Gebiet ist die Messung aufgrund von Reflexionen nicht sehr präzise, in freierem Gebiet durchaus zufriedenstellend. Allerdings sollte vor Beginn der eigentlichen Datenaufnahme ein das Gerät eine gewisse Zeit still (angeschaltet) stehen gelassen werden, damit der GPS Empfänger eine fixe & genaue Position ermitteln kann.
Bluetooth (B): Die GPS-Daten, die mittels des GPS-SIRF III Chips aufgenommen werden, können durch das BlueSMiRF RP-SMA Bluetooth-Modul an einen Empfänger übertragen werden. Die anschraubbare Antenne erlaubt eine Übertragungsreichweite von bis zu 100m im Freien (mit einer Geschwindigkeit von 9600bps - 115200bps) an ein Bluetooth-fähiges Mobilgerät oder PC via Bluetooth-USB-Stick . Die Stromversorgung der kompletten GPS-Sensorbox wird durch eingebaute Batterien und einem Kippschalter zur (De-)Aktivierung gewährleistet.
WLAN (D): Die GPS-Daten
Funktionalitäten und Tests
[12.01.11] Einbau in das Chassis xBee (A)
Auf dem Monstertruck wurde zusätzlich ein GPS-Sensor und später ein Temperatur- und Luftfeuchte-Sensor
verbaut.
- Das Dach des Monstertrucks bietet genügend Platz für die Box des GPS-Sensors, so dass die Box mit Klett-Klebeband längs darauf befestigt werden konnte. Der GPS-Sensor kann auf diese Weise leicht vom Truck entfernt werden und auch ohne den Truck getestet werden.
- Der Temperatur- und Luftfeuchte-Sensor wurde im Laderaum des Trucks mit Schrauben befestigt, so dass es während der Fahrt nicht aus dem Truck fallen kann.
GPS-Sensor Box:
In der Box wurden ein EM-406A (GPS Modul), ein MintyBoost (Spannungswandler) und ein Xbee
Pro 2,5 (Datenkommunikation) verbaut.
Xbee Pro 2,5 (Datenkommunikation)
• Indoor Reichweite: max. 100m
• Outdoor Reichwiete: max. 1600 m
• Datenübertragungsrate: max. 115.2 Kbps
• Betriebsfrequenz: 2.4 GHz
• Versorgungsspannung: 2.8 - 3.4 V
• Stromstärke während dem Senden: 215 mA (@ 3.3 V)
• Stromstärke während dem Empfangen: 55 mA (@ 3.3 V)
Abmessung: 24.38mm x 32.94mm
Weitere Details siehe: http://www.watterott.com/de/XBee-Pro-50mW-Serie-25-RPSMAnschluss
EM-406A (GPS Modul)
• 20 Kanal Empfänger
• 10m Positionsgenauigkeit, 5m mit WAAS
• Kaltstart 42s
• Warmstart 38s
• Heißstart 1s
• Outputs NMEA 0183 and SiRF binary protocol
Strom: 70mA at 4.5-6.5V
Abmessung: 30mm x 30mm x 10.5mm, 16 Gramm
Weitere Details siehe: http://www.watterott.com/de/EM406-SiRF-III-GPS
MintyBoost (Spannungswandler)
Zur Anpassung von 2 AA-Zellen (1,5V) auf 5 V
5V at 600mA
Temperatur- und Luftfeuchte-Sensor
Es wurde ein SHT15 verwendet, dies ist ein genauer und langzeitstabiler Sensor zur Messung der
relativen Luftfeuchtigkeit und der Temperatur. Zur Übertragung der Daten dient ebenfalls ein Xbee.
Feuchtigkeits- und Tempertur-Sensor - SHT15 Breakout
• 2 kalibrierte Sensoren für relative Feuchte und Temperatur
• Messbereich: 0-100% relative Luftfeuchtigkeit (RH)
• Absolute Genauigkeit: +/-2% RH (10...90% RH)
• Temperatur Genauigkeit +/-0,3°C @25°C
• Reaktionszeit < 4 Sek.
Weitere Details siehe: http://www.watterott.com/de/Feuchtigkeits-und-Temperatur-Sensor-SHT15-Breakout

Geodatenvisualisierung
Für die Anzeige der Temperatur- und Luftfeuchtedaten wurde Hyper Terminal benutzt und für die GPS Daten, wurden unterschiedliche Programme getestet:
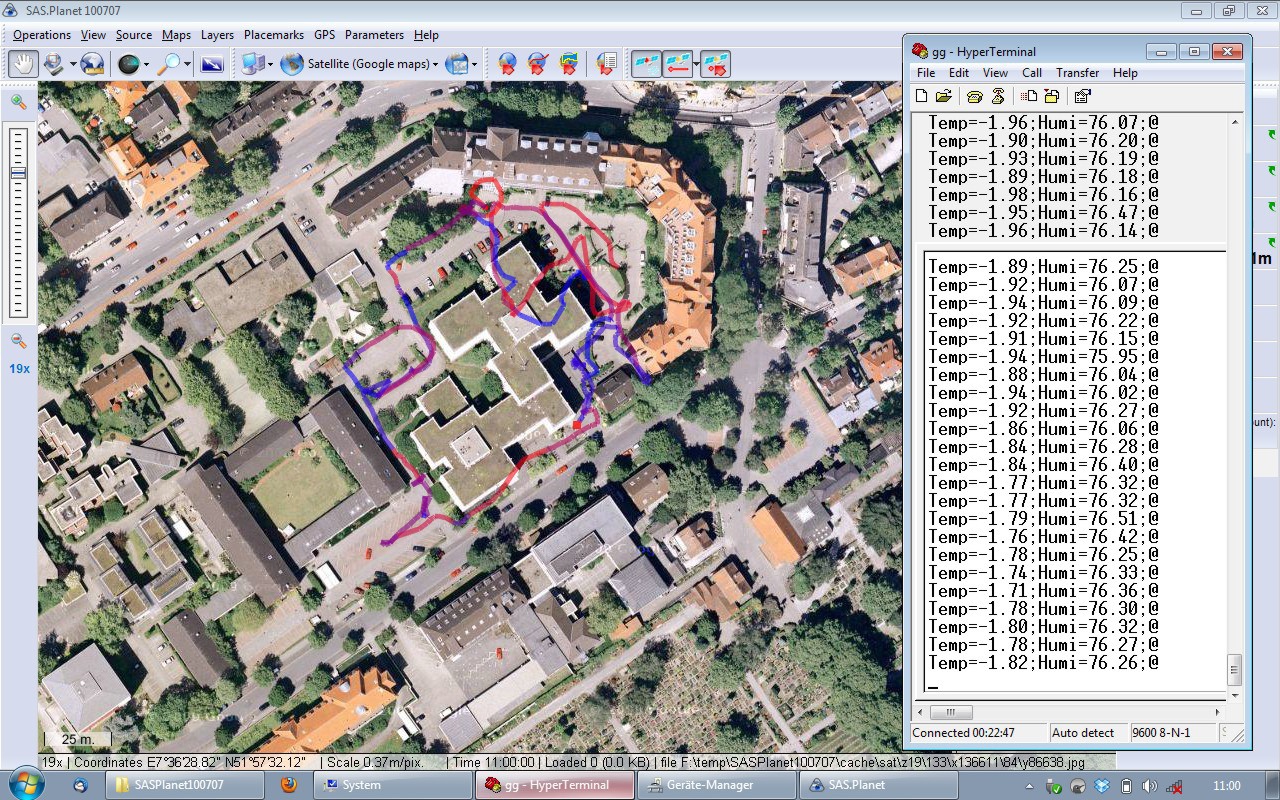
Hyper Terminal - Anzeige der Daten ohne Karte
+ Internetzugang nicht erforderlichnRoute - Detailgrad der Karte nicht genau genug
- keine externen Karteneinbindung möglich (z.B. OSM)
- GPS Gate erforderlich
+ Trackaufzeichnung möglich
+ Anzeige für GPSStatus vorhanden
+ Internetzugang nicht erforderlich
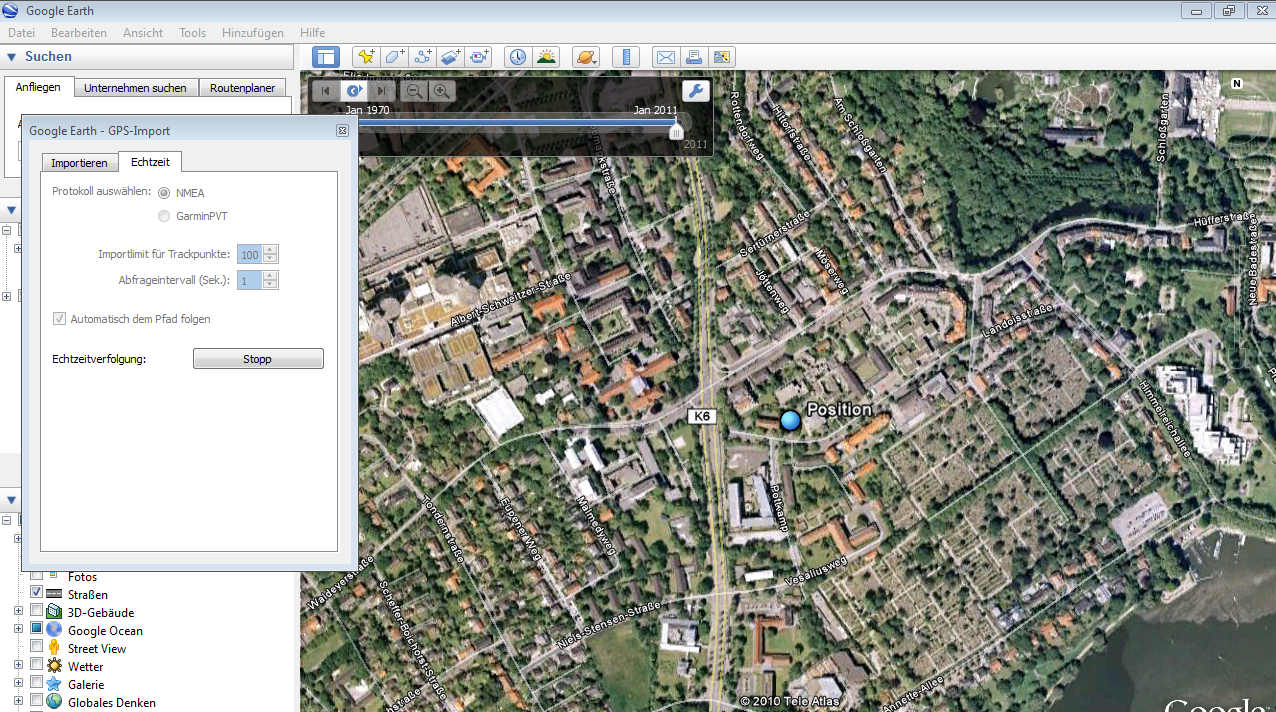
Google Earth - keine Trackaufzeichnung
- kein Empfang im Feld, da Internetzugang erforderlich
- keine Anzeige für GPSStatus
+ Detailgrad von Karten ist ok
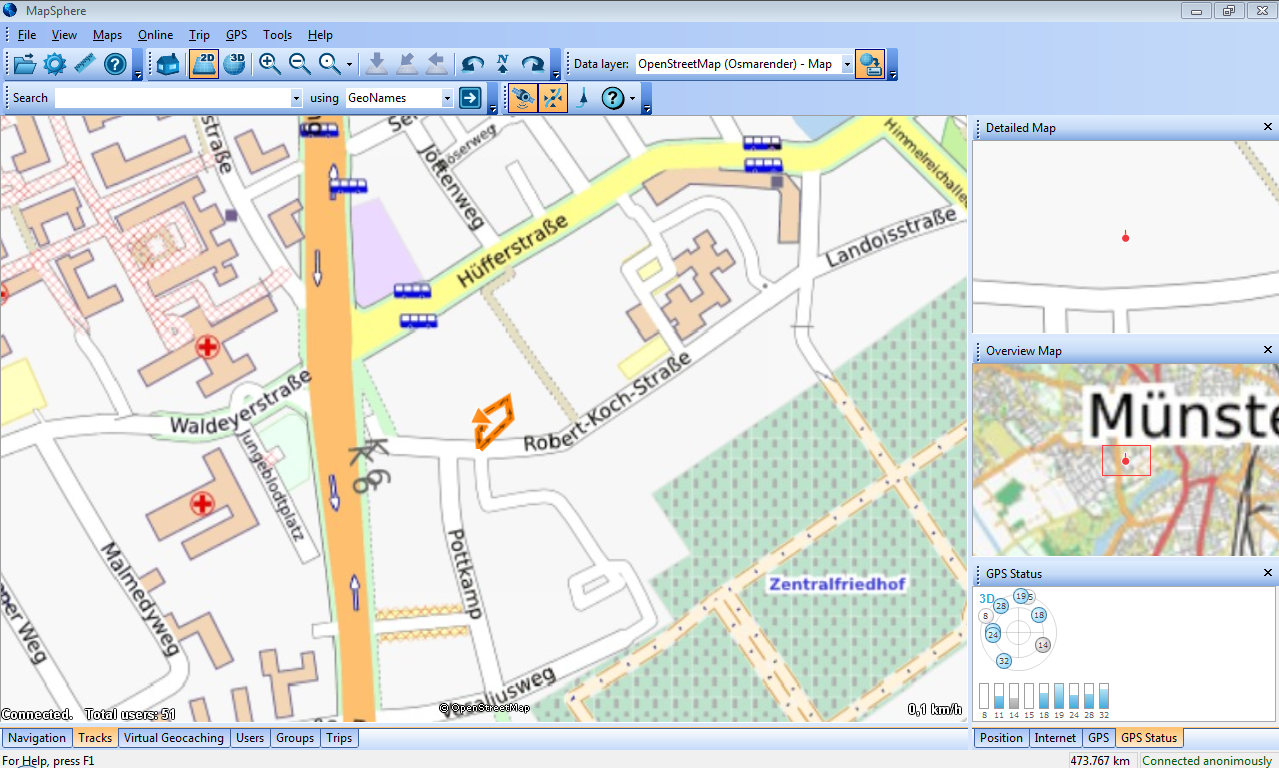
MapSphere - Updaterate für GPS-Position zu gering
+ Detailgrad der Karte ist ok
+ Trackaufzeichnung ist möglich
+ GPS Gate nicht erforderlich
+ Internetzugang nicht erforderlich
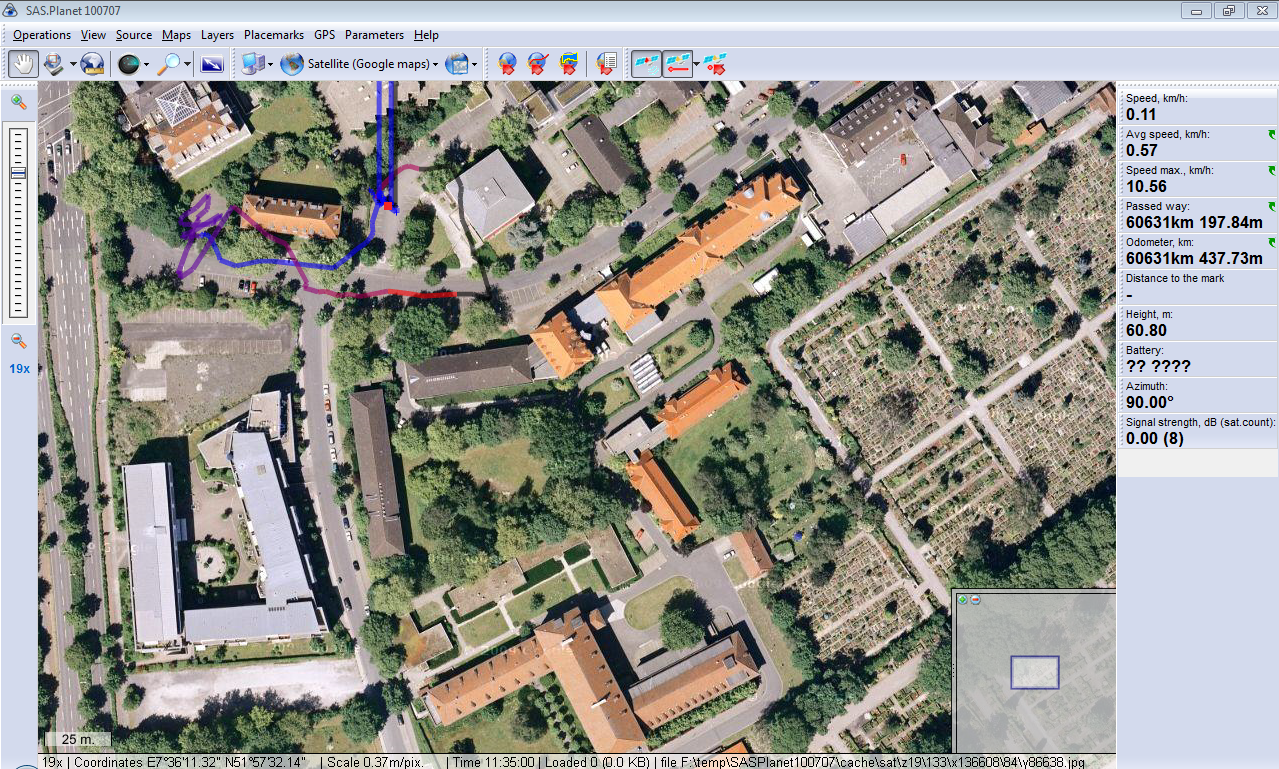
SASPlanet - GPS Gate erforderlich
+ Detailgrad der Karte ist ok
+ Karten ohne Internet vorhanden
+ Trackfunktion vorhanden
+ Satelliten-Anzeige kann eingeblendet werden
Fazit und GeoRover-Testsieger
Testsieger waren alle TeilnehmerInnen des Kurses, da sie mit unermütlicher Anstrengung an den Rovern gebastelt und die mobile Geodatenerfassung ermöglicht haben. Aus technischer Sicht hat sich das W-LAN als zu instabil erwiesen, während Bluetooth und xBee-Module sehr zuverlässig arbeiteten. Zur Visualisierung der Daten eignen sich Kombinationen aus
– GPS: SASPlanet
– GPS/Map: OSM
– Temperatur und Luftfeuchte: Hyper Terminal
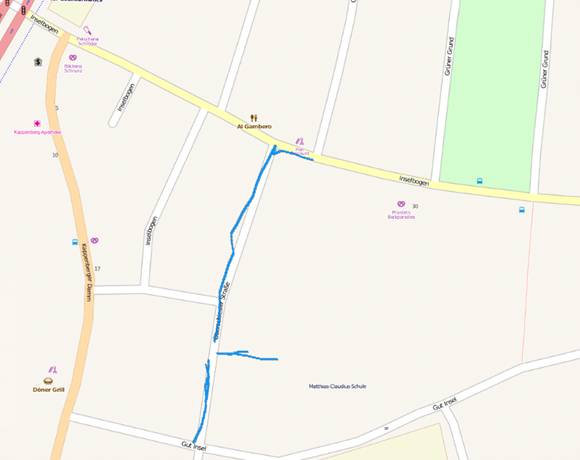
Die Weiterverarbeitung der live übertragenen GPS Daten erfolgte nun mit dem OpenStreetMap Editor JOSM mit aktiviertem livegps plugin. Dieses Plugin erfordert gpsd daemon, welches die ganze Zeit im Hintergrund laufen muss. Da dieses Plugin nur unter LINUX läuft, haben wir eine Ubuntu Live CD erstellt, welche die Pakete JOSM und livegps-Plugin sowie den gpsd-daemon enthielt. Nach dem Booten der CD und dem Anschließen des Empfängers wird dieser über den gpsd-daemon automatisch eingebunden. Danach kann, nach dem Start von JOSM und dem Aktivieren des Plugins, direkt mit dem live-tracking begonnen werden. Die aufgenommenen Punkte werden als neue Ebene in JOSM eingefügt, die als GPS Track bearbeitet und direkt zu OSM hochgeladen werden kann. Weiterhin kann man die GPS Spur auch als *.gpx Datei exportieren und in einem GIS weiterverwenden oder auf einer Web-Karte uploaden.
Nun, es war draussen bitter kalt aber es hat viel Spass gemacht!