
7.2 Zukunftsperspektiven
Die Satelliten-gestützten Navigationshilfen und Ortungssysteme werden in Zukunft verstärkt den
geowissenschaftlichen Tätigkeitsbereich beeinflussen und zwar immer dort, wo es um die Gewinnung raumbezogener
Daten im Gelände oder um die vorbereitendende Planung geht. Die Leistungsmerkmale des GPS haben in der Vergangenheit
viele Nutzer zum Umschwenken in ihrer Positionierungsstrategie bewegt (z.B. im Vermessungswesen).
Insbesondere das Verkehrs- und Logistikwesen stützt sich vermehrt auf die GPS-Technologie. Darüber hinaus
findet GPS auch immer stärker im privaten Sektor (Freizeitgestaltung) Anwendung (vgl. Abb.7.2.11).
Allerdings gibt es auch international Bedenken gegenüber einer alleinigen Navigation mittels GPS, da es besonders gegenüber dem zivilen Nutzer einige wesentliche Mängel aufweist (vergleichbares gilt für GLONASS):
- GPS und GLONASS werden weitgehend von militärischen Institutionen betrieben und kontrolliert. In Krisenzeiten kann das System also starken Einschränkungen ausgesetzt sein
- Durch die SA-Technik kann dem zivilen Nutzer ein bewußtes Hindernis in den Weg gelegt werden
- Der Zugang zum P-Code bliebt bisher verwehrt
- Die Überdeckungsbereiche und Konstellationen von Satelliten sind noch nicht optimal gelöst; DOP-Faktoren können u.U. erheblich anwachsen
- Für viele Anwender ist die Zugriffsgeschwindigkeit auf die aktuellen Daten (Navigationsmitteilung) zu langsam (ziviler Luftverkehr), insbesondere beim Landeanflug
- Die bisher weitgehend nationale Ausrichtung des Betriebs gewährleistet keine internationale Kontinuität des Systems
Aus diesem Grunde gibt es internationale Bestrebungen ein globales Satelliten Navigationssystem (Global Navigation Satellite System = GNSS) auf der Basis von GPS und GLONASS zu errichten, welches international kontrolliert und betrieben werden wird. Dafür sollen in einem ersten Schritt (GNSS 1) GPS und GLONASS aufeinander abgestimmt und optimiert werden. In einem zweiten Schritt (GNSS 2) erfolgt der Ausbau und Betrieb auf internationaler Ebene unter Berücksichtigung aller zivilen Nutzerinteressen.
Entwicklungen in den USA
Innerhalb der USA stößt das Konzept des GNSS auf breite Akzeptanz, besonders in Bereichen der zivilen Luftfahrt. Bereits 1992 gab die RTCA eine Empfehlung zur Erweiterung des GPS im Hinblick auf GNSS 1 heraus. So wird eine Vergrößerung der Verfügbarkeit und der Integrität der Satelliten mit gleichzeitiger Erhöhung der Genauigkeit des Signals gefordert um Präzisionslandungen und Rollbewegungen auf dem Flugfeld koordinieren zu können. Eine Erweiterung auf GNSS 2 sollte unmittelbar nach der ersten Ausbaustufe erfolgen.
Bisher wurden lediglich Entwicklungsarbeiten in Richtung eines erweiterten GPS über DGPS hin zum Wide Areal Augmentation System (WAAS) durchgeführt. Zusätzlich erfolgten Untersuchungen zur Freistellung einer dritten Trägerfrequenz für die zivile Nutzung mit verbessertem C/A-Code. Vmtl. wird dieser neue Träger die Bezeichnung L4 oder L5 besitzen, da L3 bereits seit der Block II-Satellitengeneration existiert und für die Übermittlung von Sensorsignalen für die globale Überwachung von Nukleartests genutzt wird (1381,05 MHz). Alternativ besteht die Überlegung, den jetzigen Träger L2 mit verbesserten Signalen auszustatten und für die militärischen Zwecke eine neue LM- Trägerfrequenz zu schaffen.
Abgesehen von den funktechnischen Modifikationen des GPS entwarf das US-amerikanische Weltraum Unternehmen Sat Tech Systems Corp. ein neues, ausschließlich für die zivile Verwendung konzipiertes Satellitensystem mit im Vergleich zum GPS deutlich niedrigeren Betriebs- und Umsetzungskosten. Es basiert auf der Überlegung 32 kleine, leichte Satelliten als Subsystem zu etablieren (also als Payload anderer auszusetzender Systeme mitzugeben), welche sich einem etwa 5000 km hohen Orbit befinden sollen. Sie sollen mit modernster Mikroelektronik ausgestattet werden und so ein wesentlich günstigeres Preis/Leistungsverhältnis aufweisen, was zu dem Namen ECONOSAT-System führte. Das System wäre kompatibel zu GPS, weist aber eine andere Signalstruktur und verbesserte Konfigurationsmerkmale auf. Die zuvor genannten Nachteile von GLONASS und GPS bestünden nicht. Im wesentlichen besäße jeder Satellit zwei Trägerfrequenzen (L1 und L2) gemäß der GPS-Vorgabe, aber mit anderen Signalcharakteristika. Beide Träger beinhalten den C/A-Code, wodurch im Empfänger laufzeitbedingte Meßfehler eleminiert werden könnte. Zusätzlich weist der C/A-Code eine Spektralbreite von 20 MHz auf, was zu einer geringeren Korrelation beim Empfang von Mehrwegsignalen führen würde. Eine praktische Umsetzung des Konzeptes steht jedoch noch aus.
Entwicklungen in der EU
Innerhalb der EU beschloß man 1994, daß Europa einen eigenständigen Beitrag zum GNSS 2 leisten muß und beauftragte deshalb eine EU-Komission, die ESA (European Space Agency) und die Firma EUROCONTROL zur Bildung der Koordinationsgruppe ETG. Zusammen mit der GNSS-High Level Group, welche Vertreter aus allen Ländern der EU und der Gerätehersteller umfaßt sollen weitere übergreifenden Maßnahmen geplant und durchgeführt werden.
Nach Mansfeld (1998) sind besonders zwei theoretische Konzepte bemerkenswert:
European Navigation Satellite System (ENSS)
ENSS wurde von Dornier Satellitensysteme GmbH vorgestellt und basiert auf der Grundidee Europa und Nordafrika ein Navigationssystem zur Verfügung zu stellen, welches unter internationaler Kontrolle rein zivile Ausbrägung besitzt. Zusätzlich soll die Kommunikation zwischen den Satelliten ermöglicht werden. Konzeptionell wird das System durch die geographischen Rahmenbedingungen bestimmt. Hier sollen 12 sog. IGSO-Satelliten auf inklinierten geosynchronen Bahnen in etwa 36.000 km Höhe die Erde umkreisen (Abb. 7.2.1), wobei zwei unterschiedliche Bahnen mit Umlaufzeiten von je 24 h vorgesehen sind. Zur Verbesserung der Sichtbarkeit sind an den Rändern des Überdeckungsgebietes drei zusätzliche geostationäre Satelliten (GEO-Sat.) vorgesehen. Dafür wurden zunächst die drei Inmarsat-Satelliten bereitgestellt (s.o.).
Im Mittel besteht die optimale Sichtbarkeit zu jeweils acht Satelliten gleichzeitig, im schlechtesten Fall nur zu fünf Trabanten. Für den europäisch-nordafrikanischen Raum liegt der PDOP nie höherals 4,5. Alle Satelliten senden auf zwei hochfrequenten Träger und zwar im L- und im C-Band. Die C-Band Belegung soll vor allem die ionosphärischen Laufzeitveränderungen minimieren; gleichzeitig sollen auf dem C-Band Korrekturdaten für die DGPS-Anwendung bidirektional gesendet werden. Eine Integritätsprüfung kann aufgrund der regionalen Ausrichtung des Systems vom Boden aus durchgeführt und innerhalb von ca. 1 s an den Nutzer weitergegeben werden. Nach vorläufigen Berechnungen wird angenommen, daß der Entfernungsmessfehler bei ENSS bei etwa 1,3 Meter (UERE) läge. Daraus resultiert ein Positionfehler von ca. 3,6 m horizontal und ca. 4,1 m vertikal (95% Wahrscheinlichkeit). Dieses Konzept wurde so nicht umgesetzt. Vielmehr flossen einige grundlegende Ideen in die alternative PROPNASS ein.
Preoperational In-Orbit Demonstration System (PROPNASS)
Als fester europäischer Beitrag zu GNSS 2 wurde fest PROPNASS ausgewählt, welches gemeinsam durch die Daimler-Benz Aerospace und die Russian Space Agency konzipiert wurde. Auch hier handelt es sich um ein Regionalsystem, welches Positionierung und Kommunikation gleichermaßen integriert (Abb. 7.2.1). Vergleichbar dem ENSS werden IGSO-Satelliten (hier nur acht Stück!) eingesetzt. Die geringere Anzahl von Trabanten führt zu einer dem ENSS veränderten regionalen Verfügbarkeit (Abb. 7.2.2).
Abb. 7.2.1: Schematische Darstellung des theoretischen Funktionsschemas von PROPNASS Mansfeld (1998)
Abb. 7.2.2: Schematische Darstellung der theoretischen Satellitenbahnen in PROPNASS Mansfeld (1998)
Aufgrund der Satellitencharakteristika sollen auch hier die Informationen auf zwei hochfrequenten Trägern im L- und C-Band aufmoduliert werden. Angestrebt werden soll ein garantierbarer GDOP kleiner 5m über 24 h Dauermessung.
Ergänzung zu INMARSAT-Satelliten
Beide oben skizzierten Konzepte basieren auf der Einbindung eines regionalen Navigationssystems in ein übergreifendes Verbundsystem (Abb. 7.2.3) wie es etwa das WASS darstellt. Das europäische ENSS würde bei seiner Realisierung auf drei der vier bereits bestehenden geostationären INMARSAT-Satelliten zurückgreifen. Einer dieser Satelliten, INMARSAT-3, steht über dem westlichen Atlantik und ist Bestandteil des aktiven Wide Area Augmentation Systems (WAAS). Er dient dort vorwiegend als Kommunikationssatellit mit bidirektionalem Transponder für Frequenzen im C- und L-Band (Abb. 7.2.4). Das von ihm erzeugte Korrektursignal für WAAS dient der Verbesserung der zivilen Luftnavigation im Bereich Nord- bzw. Südamerika mittels GPS und GLONASS.
Abb. 7.2.3: Funktionsweise des WAAS mittels INMARSAT-3 Mansfeld (1998)
Als erste Planungsphase wurde innerhalb von GNSS 1 die Bereitstellung von Korrekturdaten über die beiden europäischen Inmarsat-3 beschlossen. Somit kann ein Overlay-System ähnlich dem nordamerikanischen WAAS für Europa angeboten werden; es heißt EGNOS (European Geostationary Navigation Overlay Service). Diese Entwicklung mündete 2004 in das eigenständige europäische Satelliten-Navigationssystem Galileo . Administrative und technische Details finden Sie in den Unterlagen der EU:
- Kommissionsbericht 2003 (PDF-Document)
- Frequenzen und Signale 2002 (PDF-Document)
EGNOS (GALILEO) (taken from ESA)
EGNOS is Europe's first venture into satellite navigation. It will augment the two military satellite navigation systems now operating, the US GPS and Russian GLONASS systems, and make them suitable for safety critical applications such as flying aircraft or navigating ships through narrow channels. Consisting of three geostationary satellites and a network of ground stations, EGNOS will achieve its aim by transmitting a signal containing information on the reliability and accuracy of the positioning signals sent out by GPS and GLONASS. It will allow users in Europe and beyond to determine their position to within 5 m compared with about 20 m at present. EGNOS is a joint project of the European Space Agency (ESA), the European Commission (EC) and Eurocontrol, the European Organisation for the Safety of Air Navigation. It is Europe's contribution to the first stage of the global navigation satellite system (GNSS) and is a precursor to Galileo, the full global satellite navigation system under development in Europe. EGNOS will become fully operational in 2004. In the meantime, a test signal, broadcast by two Inmarsat satellites, allows potential users to acquaint themselves with the facility and test its usefulness.
EGNOS will provide the information needed to use navigational signals from GPS and GLONASS satellites for such
safety critical applications. It will improve the accuracy of positions from about 20 m to 5 m, inform
users of the errors in position measurements and warn of disruption to a satellite signal within six seconds. EGNOS
will take responsibility and guarantee the service.
Three geostationary satellites and a complex network of ground stations will carry out the task. The three satellites
will send out a ranging signal similar to those transmitted by the GPS and GLONASS satellites. However, the signals will
be more than another opportunity for users to fix a position. They will also provide information about the accuracy of
position measurements delivered by GPS and GLONASS so that a train driver, for example, will be able to assess whether
the position is accurate enough to rely on.
This information, or integrity data, will be modulated onto the ranging signal. It will include accurate information on the position of each GPS and GLONASS satellite, the accuracy of the atomic clocks on board the satellites and information on disturbances within the ionosphere that might affect the accuracy of positioning measurements. The EGNOS receiver, which is more sophisticated than a standard satellite navigation receiver, will de-code the signal to give a more accurate position than is possible with GPS or GLONASS alone and an accurate estimate of errors.
The EGNOS signal will be broadcast by two Inmarsat-3 satellites, one over the eastern part of the Atlantic, the other over the Indian Ocean, and the ESA Artemis satellite which is in Geostationary Earth orbit above Africa (vgl. Abb. 7.2.4). Unlike the GPS and GLONASS satellites, these three will not have signal generators on board. A transponder will transmit signals up-linked to the satellites from the ground, where all the signal processing will take place. The sophisticated ground segment will consist of about 30 ranging and integrity monitoring stations (RIMS), four master control centres and six up-link stations (Abb. 7.2.10).
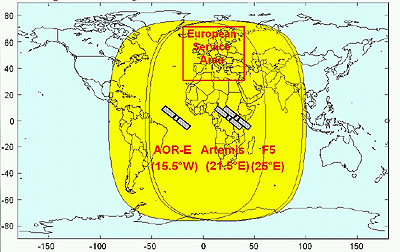
Abb. 7.2.4: Schematische Darstellung der theoretischen Satellitenbahnen des ENSS mit den drei GEO-Inmarsat (rote Ellipsen) Mansfeld (1998)
The RIMS measure the positions of each EGNOS satellite and compare accurate measurements of the positions of each GPS and GLONASS satellite with measurements obtained from the satellites' signals. The RIMS then send this data to the master control centres, via a purpose built communications network.
The master control centres determine the accuracy of GPS and GLONASS signals received at each station and determine position inaccuracies due to disturbances in the ionosphere. All the deviation data is then incorporated into a signal and sent via the secure communications link to the up-link stations, which are widely spread across Europe. The up-link stations send the signal to the three EGNOS satellites, which then transmit it for reception by GPS and GLONASS users with an EGNOS receiver.
Considerable redundancy is built into EGNOS so that the service can be guaranteed at practically all times. At any one time, only one master control centre will be the master, with another on stand-by to take over instantaneously should the first one fail. There is redundancy in the up-link stations, too. Only three are needed to operate EGNOS, one for each satellite. The other three are in reserve in case of failure.
Space segment
The EGNOS space segment is made up of navigation transponders onboard the geostationary satellites Inmarsat III Atlantic Ocean Region-East (AOR-E) and Inmarsat III F5, together with the new ESA telecommunications satellite Artemis . In addition, EGNOS uses signals from the the GPS and the GLONASS constellation. EGNOS relies on the availability of geostationary satellites equipped with navigation payloads to broadcast a GPS look-alike signal containing integrity and wide-area differential corrections to users. The operational system uses three satellites to disseminate this data: Inmarsat III Atlantic Ocean RegionEast (AOR-E) at 15.5ºW; ESA ARTEMIS at 21.5ºE; and Inmarsat III F5 at 25ºE. The navigation payloads (Abb. 7.2.5) on all these satellites are essentially bent-pipe transponders so that a message uploaded to a satellite is broadcast to all users in the geostationary broadcast area of the satellite.

Abb. 7.2.5: Small Satellite Centre - EGNOS navigation payload during a tharmal vacuum test (ESA, 2001)
Ground segment
The EGNOS ground segment is composed of: the Master Control Centres; the Ranging and Integrity Monitoring Stations; the Navigation Land Earth Stations; the EGNOS Wide Area Network; and support facilities.
Master Control Centre
Once the EGNOS system is complete there will be four Master Control Centres (MCC), each having: A central control facility for m onitoring and controlling EGNOS G/S mission monitoring and archiving ATC I/F, a central processing facility with a real-time software system developed to high software standards in order to: provide EGNOS WAD corrections to ensure the integrity of the EGNOS system for users and to utilise independent RIMS channels to check corrections (Abb. 7.2.6).

Abb. 7.2.6: MCC Locations in Europe (ESA, 2003)
Ranging and Integrity Monitoring Stations
The EGNOS system will have 34 Ranging and Integrity Monitoring Stations (RIMS) with a GPS/GLONASS/GEO receiver and an atomic clock. The EGNOS RIMS network is based on TCP/IP, Framerelay and VSAT. Main functions are to perform pseudorange code/phase measurements towards SVis (GPS L1 and L2 + GEO/GLO L1), to demodulate SIS messages, to mitigate local multipath and interference, to support the detection of anomalies in signals from space (e.g. EWF GPS/GEO), to packet and transmit data to the MCCs via FEE/EWAN, to provide BITE and M&C capabilities and to provide time offsets UTC(k)/ENT (UTC RIMS) (Abb. 7.2.7).
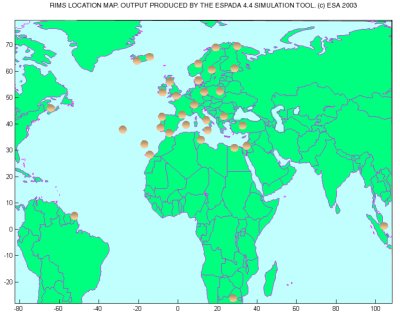
Abb. 7.2.7: RIMS Location (ESA, 2003)
Navigation Land Earth Stations
The first stage EGNOS Advanced Operational Capability architecture foresees seven Navigation Land Earth Stations (NLES), five of which will uplink EGNOS messages to the Inmarsat III Atlantic Ocean Region East (AOR-E) and Indian Ocean Region (IOR) satellites, and two of which will uplink EGNOS messages to the Artemis satellite. The main functions of the NLES will be to: generate a GPS-like signal and transmit this to a GEO transponder, synchronise this signal to EGNOS time (ENT) at the output of the GEO L1-band antenna and to control the code/carrier coherency. Further the transmission of the GIC and WAD messages to satellites in geostationary orbit (Abb. 7.2.8).
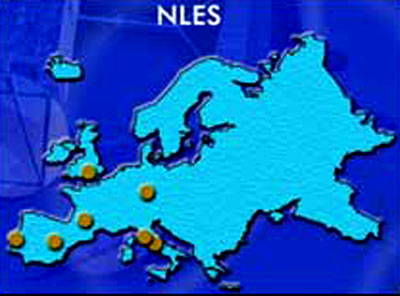
Abb. 7.2.8: NLES Locations in Europe (ESA, 2003)
EGNOS Wide Area Network
The EGNOS Wide Area Network (EWAN) links all the EGNOS components together (Abb. 7.2.9).
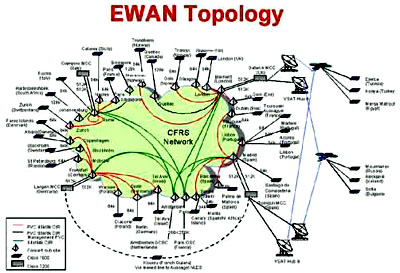
Abb. 7.2.9: EWAN Topology (ESA, 2003)
Support facilities
Support facilities are made up of the Performance Access Check out Facility (PACF) and the Application Specific Qualification Facility or ASQF.
The PACF is a single unique centralised facility that provides non-critical operations support, engineering support and some maintenance and logistics support capabilities for the EGNOS operations system. ASQF is a set of tools that provide the technical means through which user-specific applications are qualified in the domain of operations.
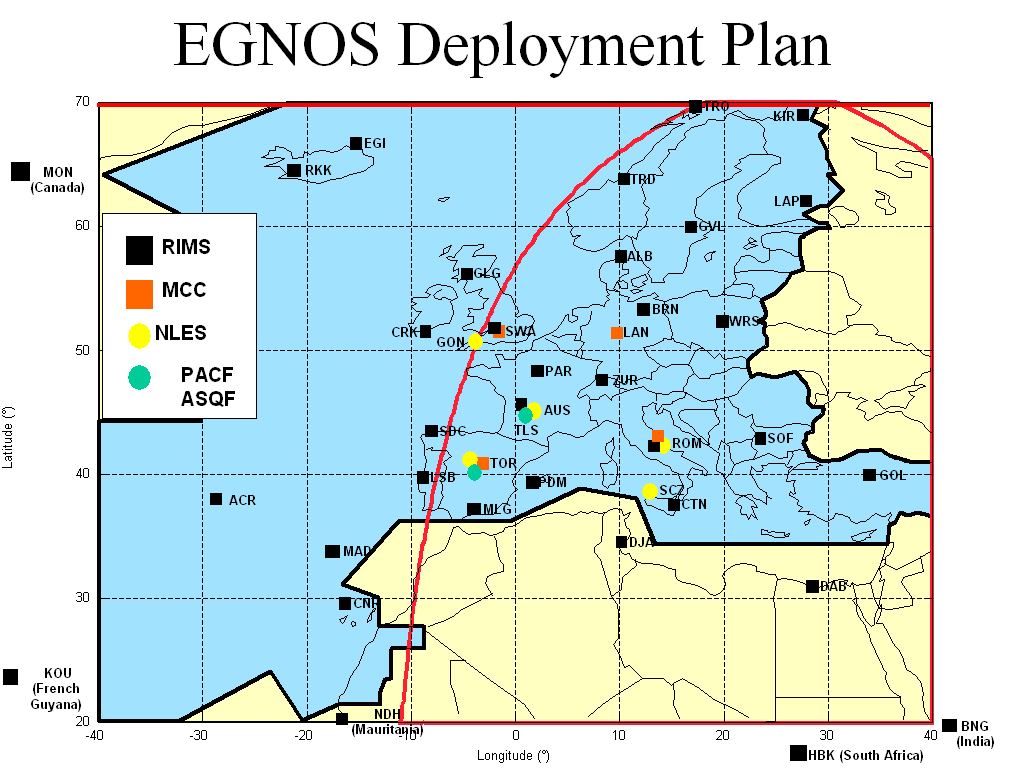
Abb. 7.2.10: EGNOS Deployment Plan (ESA, 2003)
GPS-Entwicklungen im Alltag
Das GPS ist aus weiten Teilen des Alltagslebens nicht mehr wegzudenken, so findet es in Mobiltelefonen, Tablets, Outdoor-Ausrüstung Uhren, Kameras ,Kameras u.v.m. in allen Bereichen des öffentlichen und privaten Lebens vielfältigen Einsatz (Abb. 7.2.11) . Die Entwicklung der Mikroelektronik erlaubt heute den Bau von Kleinstempfängern, welche nicht viel größer als Münzen sind. Die japanischen Behörden hatten sich deshalb früh für den Ausbau eines verbesserten globalen Satellitennavigations-Verbundsystems eingesetzt. Unter Federführung der National Space Developement Agency (NASDA) wurden bereits 1996 erste theoretische Empfehlungen zur Entwicklung eines neuen Experimentalsatelliten, aus dem ein eigenständiges Satelliten-Navigationssystem abgeleitet werden konnte, ausgesprochen. Drei niedrig fliegende Satelliten (LEO), welche in einer ersten Testphase seit 2005 erprobt werden gaben den Anstoß zu einem Multi Function Transport Satellites (MTSAT) System, das als Bestandteil eines nationalen Satellite Based Augmentation Systems (MSAS) in das globale GNSS 2 einfließt. Globale GPS/EGNOS/GLONASS Verbundsysteme sind momentan in der Umsetzung und finden zunehmend Einszug in unseren Alltag.


Abb. 7.2.11: GPS-Navigator der Firma Casio : Erstes serienmäßiges Uhren-GPS 1999, moderne Freizeit-GPS-Uhr der Marke TomTom ( 2016) sowie die GPS-Outdoor Kamera Nikon AW 130 (2016)