
1.1 Historisches
Orientierungsprobleme
Das Problem der räumlichen Orientierung und reproduzierbaren Standortbeschreibung stellt eine in der Menschheitsgeschichte allgegenwärtige Herausforderung an den Intellekt innerhalb der unterschiedlichen Zivilisationskreise dar. Es ist anzunehmen, daß bereits während der Frühphasen menschlichen Evolution die Information über Wegstrecken und Lage besonders wichtiger Orte , wie Wasserstellen, Weide- bzw. Jagdgründe verbal oder in einfachen Skizzen von unseren Vorfahren untereinander ausgetauscht wurden. Die Information wird hierbei durch eine relative Wegbeschreibung innerhalb des räumlichen Erfahrungshorizontes jedes Individuums zur endgültigen Zielbeschreibung summiert, z.B.:
'Folge dem Flußlauf bis an eine Baumgruppe. Von dort steigst du den Berg rechterhand hinauf, bis zur Felskuppe. Dort findest Du die Quelle unterhalb des höchsten Baumes …'
So einfach und effizient uns heute diese Methode erscheint, so problematisch ist sie doch im Alltag für uns alle, wenn wir schnell, sicher und ohne Karte einem auswertigen Besucher den Weg zurück zum Bahnhof durch eine komplexere Umwelt erklären müssen. Auch wir stützen uns bei der Weg- und Endpositionsbeschreibung, also auf markante Geländepunkte (z.B. Straßenkreuzungen, Ampeln, Gebäude…).
Mit dem Verlassen des traditionellen räumlichen Umfeldes und der Erforschung bisher unbekannter Regionen wurde es in der Vergangenheit notwendig, die an Komplexität zunehmende Information in Hinblick auf Positionierung und Lagebeschreibung allgemeingültiger, damit abstrakter zu verarbeiten. Die einfache Wegskizze wurde in einigen Hochzivilisationen durch das erste Kartenwerke ersetzt (Abb. 1.1.1) ; der Werdegang der Kartographie nimmt Ihren Lauf!

Abb. 1.1.1: Frühe babylonische Weltkarte, um 2600 v.Chr., mit Babylon im Zentrum, durchschnitten von Euphrat und Tigris. Die unterschiedlichen Kreise stellen umgebende Königreiche und den allumfassenden Ozean dar (Wilford, 1998)
Wachsende wirtschaftliche Verknüpfungen und politische Interessen zwischen den Kulturen förderten die kartographische Beschreibung von Handelsrouten und Wegstrecken in der Antike. Mit der etwa zeitgleich einsetzenden frühen Seefahrt mußten aber neue Methoden zur Navigation und Positionsbestimmung innerhalb eines bisher unbekannten Umfeldes gefunden werden, welche mit einem Minimum an Landmarken auskamen. Wesentliche Faktoren dieser neuen Kunst zu Navigieren waren die Betrachtung der Gestirne, der vorherrschenden Windrichtungen (damit die Definition von Bezugsrichtungen) und die grobe Zeitmessung als universelle Bezugspunkte . Zusätzlich wurden erste künstliche Navigationshilfen von Menschenhand errichtet, wie z.B. der Leuchtturm von Alexandria. Da man noch weitgehend küstennahe Seefahrt betrieb, waren Landmarken für die einfache geometrische Positionsbestimmung besonders wichtig (Abb. 1.1.2).
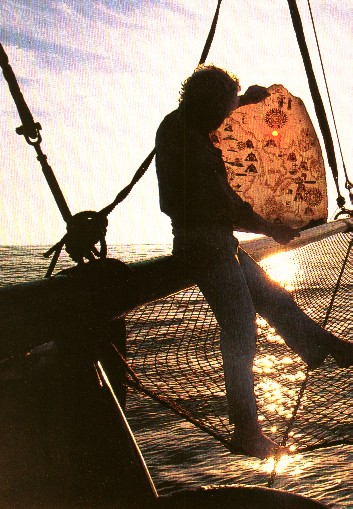
Abb. 1.1.2: Mittelalterliche Seekarte des mediterranen Raumes mit wichtigen Landmarken zur Küstennavigation (Wilford, 1998)
Frühe Navigation
Nicht nur im Zentrum der Alten Welt oder Asiens wurden Methoden zur Positionsbestimmung bzw. Navigation auf dem Meer gesucht und entwickelt, auch die frühen Hochkulturen Südamerikas/Polynesiens besaßen das Wissen und das Können die Ozeane systematisch mit ihren Flößen zu befahren. Thor Heyerdahl (1948), (Film*: 33Mb!) , ein Wissenschaftler und praxisnaher Forscher zeigte durch seine 1947 durchgeführte dreimonatige Expedition KON-TIKI (Film*: 50 Mb!) , daß....
'…die alten Polynesier große Seefahrer waren. Sie steuerten am Tag nach der Sonne und
in der Nacht nach den Sternen. Ihre astronomischen Kenntnisse waren verblüffend. Sie wußten, daß
die Erde rund ist, und hatten Namen für so komplizierte Begriffe wie 'Äquator, Ekliptik' und 'nördlicher
bzw. südlicher Wendekreis'. Auf Hawaii schnitten sie Seekarten ihrer Meeresumgebung in die Schale von runden
Flaschenkürbissen, und auf einzelnen anderen Inseln stellten sie Detailkarten aus Flechtwerk her, wobei Perlmuttschalen
die Inseln darstellten und Knoten bestimmte Strömungsrichtungen markierten. Die Polynesier kannten fünf Planeten,
die sie 'wandernde Sterne' nannten, und unterschieden sie von den Fixsternen, für die sie fast 300 unterschiedliche
Namen geprägt hatten. Ein guter Steuermann im alten Polynesien wußte ganz genau, wo die einzelnen Sterne am
Himmel heraufkommen, und wo sie zu den verschiedenen Zeiten der Nacht und zu den verschiedenen Zeiten des Jahres stehen
würden. Er wußte auch welche Sternbilder über den einzelnen Inseln kulminierten. Es kam vor, daß
eine Insel den selben Namen hatte wie der Stern, der über ihr stand, Nacht um Nacht, Jahr für Jahr. [.....]
Geschichtliche Überlieferungen berichten, daß die Häuptlinge von Tahiti Hawaii besuchten, das über
2000 Sm weiter nördlich und einige Grade weiter westlich liegt …"
Heyerdahl, 1948
Das oben so beeindruckend beschriebene umfangreiche Wissen außereuropäischer, alter Kulturen im Hinblick auf die frühen Methoden der Astronavigation existierte auch in den alten Kulturen Asien und Arabiens . Die eurozentrischeSichtweise bzgl. der Entwicklung und Geschichte von Navigations- und Positionierungsverfahren macht deshalb sinnvoller Weise einer globalen Sicht Platz.
Kartographie
Art und Weise der Positionierung blieben in ihrem Grundprinzip bis zum Auftauchen des Magnetkompass und der weiterentwickelten Navigationsinstrumente unverändert. Im Zeitalter der großen europäischen Entdeckungen , also etwa vom 13. -15. Jahrhundert (da Gama, Magellan, Columbus...) war das Verlangen nach präzisen Navigationshilfen groß. In Küstennähe verhalf das Prinzip der Peilung und Standlininenkonstruktion zu genauen, relativen Positionen (Abb. 1.1.3); begab man sich jedoch auf die Weiten des Ozeans, mußten landunabhängige, allgemeingültige geometrische Bezugspunkte definiert werden, auf die man sich während der Positionsbestimmung mit seinen Berechnungen von Sonnenstand und relativer Höhe beziehen konnte. Seit den Endeckunksfahrten des Christoph Columbus war anerkannt, daß es sich bei der Geometrieform der Erde um eine Kugel i.w.S. handelt. Erst jetzt konnte die Kugelform Einfluß auf die Kartengestaltung und -Projektion nehmen!
Abb. 1.1.3: Prinzipielles Peilungsverfahren zur Definition einer Standlinie in Küstennähe (Wells, 1987)
Man begann bzgl. der Position in Begriffen wie geographischer Breite und geographischer Länge zu denken, wobei das kartographische Bezugssystem je nach Erdteil oder Nation unterschiedlich sein konnte. Die geographische Breite zu einem Bezugspunkt ließ sich bereits über den Sonnenstand vergleichsweise genau bestimmen; die geographische Länge hingegen konnte, mangels exakter Zeitmessung, nur durch sogenanntes Koppeln von Einzelpositionen, Richtung und durchsegelter Strecke/pro Zeiteinheit abgeschätzt werden. Windversatz, Stürme oder Meeresströmungen verfälschten die ohnehin ungenaue Position erheblich.
Mit demAufstieg Englands zur dominierenden Seeweltmacht im 18. Jahrhundert wurdenneue Maßstäbe in der Navigationauf See gesetzt. 1765 wurde in England die erste hinreichend genaue mechanische Schiffsuhr entwickelt, welche die bis dahin im Einsatz befindlichen Sanduhren ('Gläser') an Bord ersetzte und damit erstmalig die Bestimmung einer genauen geographische Längeerlaubte. In Greenwich erfolgte 1884 die Festlegung des ersten global gültigen Bezugssystem für die Seeschiffahrt: Die Erdkugel wurde in 360°-Gitternetz eingeteilt (Abb. 1.1.4), wobei der 0°-Längenkreis (Meridian) durch die Lage des Observatoriums in Greenwich definiert ist. Das System der Längengrade ist in zwei 180°-Segmente östlich und westlich von Greenwich unterteilt (Meridian = Mittag). Im gleichen Abstand zu den Polen verläuft der Äquator (= Gleicher), welcher die Meridiane halbiert. Nördlich und südlich des Äquators verlaufen parallel zu ihm die zu den Polen im Umfang kürzer werdenden Breitenkreise (0°-90°). Ein Position konnte deshalb durch ein Koordinatenpaar, wie z.B.: N 25° 23' 43'' - E 162° 48' 55'' definiert werden.
Abb. 1.1.4: Geometrie einer Position nach Greenwich, projekziert auf ein beliebiges Kartensystem mit den Koordinaten x, y und z (Wells, 1987)
Die Greenwich-Gradeinteilung stellt das erste universelle Bezugssystem für jede Positionsbestimmung auf der Erde dar. Warum existieren aber je nach Region unterschiedliche Positionsparameter nebeneinander? Die Antwort liegt in der variablen mathematischen Möglichkeit der geometrischen Projektionen dieses Gradsystems auf eine zweidimensionale Kartengrundlage (z.B. Mercator, Bessel..) bzw. in der historisch gewachsenen Vielfalt landestypischer Kartenbezugssysteme und eigener geodätischer Grundlagen. Im Hinblick auf die noch zu erläuternde GPS-Technologie (GPS = Global Positioning System) ist dies von e rheblicher Bedeutung, denn eine errechnete Position muß immer im jeweiligen lokalen Bezugssystem sinnreich sein. Deshalb bietet jedes GPS neben der universellen Positionsangabe in Grad/Minuten eine breite Palette unterschiedlicher lokaler Bezugssysteme an.
Geodäsie
Geodätische Bezugssysteme sind aufgrund der historischen Entwicklungen von Land zu Land unterschiedlich gestaltet. Mit der allgemeinen Anerkennung der Kugelform (oder besser: Rotationsellipsoid) der Erde, kam es neben der Festlegung des 0°-Meridians für die Seefahrt in Greenwich (England) auch zur Definition nationaler, z.T. rechtwinkliger, metrischer Projektionen (z.B. UTM, Gauss-Krüger * ..), welche sich an ein lokales, landfestes Kartendatum (z.B. Potsdam, Madrid, Paris ...) anlehnen. Alle möglichen Bezugssyteme lassen sich aber über mathematischen Transformationsformeln ineinander überführen. In fast jedem europäischen Land wurden so bis Mitte des letzten Jahrhunderts einige wenige Orte mittels astronomischer Positionbestimmungen als Basispunkte festgelegt (sog. Zentral-, Haupt-/oder Festpunkte). Einer dieser Festpunkte (z.B. eine Landeshauptstadt) war dann definitionsgemäß der Startpunkt einer über Traversen und Winkelmessungen definierten Aufreihung weiterer Hauptpunkte niederer geodätischer Ordnung usw… Über die enge Vermaschung der Punktnetze konnte dann die gesamte Region in Lagebezug zur zum Ursprungsort (Datum) aufgemessen werden. Mathematische Grundlagen sind die der Trigonometrie, welche schon zur Antike zur relativen Lagebestimmung von Flächen benutzt wurden (Abb. 1.1.5).
Abb. 1.1.5: Prinzip der klassischen trigonometrischen Netze verschiedener Ordnungen in der Geodäsie (Wagner, 1958)
Erst mit der Entwicklung und Verfeinerung optisch-mechanischer Peil- und Winkelbestecke konnte der auftretende Fehler von einigen Metern in den Submeterbereich aufgemessener topographischer (Fest-) Punkte (TP) gedrückt werden. Heute werden für Vermessungszwecke oftDGPS-gesteuerte Hochpräzions-Teodolithe bzw. Geolithen eingesetzt, womit sich sich Genauigkeiten im Submillimeterbereich erzielen lassen (Abb. 1.1.6).

Abb. 1.1.6: Ein DGPS-gesteuerter Laser-Geolith zur Winkel- und Entfernungsmessung im Einsatz (Wilford, 1998)
Satellitenzeitalter
Mit dem Anwachsen der Genauigkeitsansprüche und der immer noch bestehenden Notwendigkeit eine global einheitlich einsetzbare Positionierungsmethode bereit zu stellen, wandte man sich mit Beginn des Raumfahrtzeitalters (1957, Sputnik!) zunehmend der Entwicklung extraterrestrischer Positionierungssysteme zu. Ein extraterrestrisches Positionierungssystem berechnet die Punktposition nahe oder auf der Erdoberfläche mittels Nutzung physikalischer Meßmethoden. Ziel war es, an jedem Ort der Erde eine Positionierung zu ermöglichen ohne auf ein lokal geltendes Bezugssysteme bzw. Zentralpunkte zurückgreifen zu müssen. Man konzentrierte sich deshalb auf das elektromagnetische Spektrum als Träger der Information, sowohl in seiner reflektiven als auch emittierten Form. In gewisser Weise gab es ja bereits die bewährte Methode der Astronavigation (Sextanten), wie sie an Bord von Schiffen seit vielen Jahren Einsatz findet. Allerdings liegen die durch Bestimmung der Azimutal- bzw. Höhenwinkel der Sonne/Gestirne ermittelten Schiffsorte bei ruhiger See in einem Genauigkeitsbereich von max. 0,3° Grad (= 300-400 m). Daneben wäre eine Echtzeit-Positionsbestimmung für schnellbewegte, moderne Objekte wie z.B. Flugzeuge, mittels Sextanten unmöglich!
Bereits während des Zweiten Weltkrieges nutzte man zunehmend den Mikrowellenbereich des elektromagnetischen Spektrums (EMS) zur wetterunabhängigen Navigation von Flugzeugen (Radar C- und S-Band). Es handelte sich bei diesem Verfahren jedoch um eine relativen Positionierung in Hinblick auf seine unmittelbare Umgebung (Radarpeilsender!); eine genaue Karte und die genaue Position der Sendestation war nach wie vor für die Besatzung zur Lagebestimmung notwendig. Nach dem Ende des Zweiten Weltkrieges ging man mit der zunehmenden Entwicklung der Raumfahrttechnik zur exakten Beobachtung künstlicher Erdtrabanten, der Satelliten, mittels optischer Verfolgungskameras (tracking cameras) über.
Diese Verfahren nutzten die bekannten geometrischen Bahnparameter hochreflektiver Satelliten (Abb. 1.1.7), ihre genaue Konstellation in Bezug zum Fixsternhimmel zur trigonometrisch exakten Berechnung des Kamerastandortes - eine weitere Vermaschung der Positionen erbrachte dann die global unabhängige Position! Vorraussetzung war die Verfügbarkeit mehrer entsprechender Kameras (z.B. BC-4) und die Sichtbarkeit von Satelliten. Zu Forschungszwecken wurde weltweit ein Triangulkartionsnetzwerk entsprechender Kameras mit 45 Zentralstationen eingerichtet, deren Interaktion eine Positionsbestimmung mit einer Genauigkeit von bis zu 5 m zuließ (Wells, 1987).
Abb. 1.1.7: Erscheinungsbild zweier hoch reflektierender Satelliten am nächtlichen Firmament
Obwohl das BC-4-System erstmalig eine realtiv genaue extraterrestrische optische Positionierung zuließ, ging man neue Wege um die Statik und Wetterabhängigkeit des Tracking-Apparates zu überwinden. Heute finden optische Methoden nur zu exakten Positionsbestimmung im Bereich der Satellitenverfolgung und -Orbitkontrolle statt - jedoch fast immer in Kombination mit Funküberwachung des Gesamtsystems.
*Exkurs: Das Gauß-Krüger-System
Das Gauß-Krüger-System ist das in der Bundesrepublik Deutschland dominierende rechtwinklige Koordinatensystem mit Rechts- und Hochwerten bezogen auf das Bessel-Ellipsoid. Viele GPS-Empfänger verfügen in ihrer Software über direkte Positionstransformationen in dieses wichtige kartographische Bezugssystem. In den neuen Bundesländern wurde ein ähnlich strukturiertes System nach dem Krieg eingeführt, welches sich jedoch auf das Krassowski-Referenzellipsoid bezieht. Letzteres wird aber von GPS-Seite bisher nicht vollständig unterstützt.
Da die Meridiane polwärts zusammenlaufen, sind die Gradnetzfelder Trapeze, und die Koordinaten eines Punktes sind durch ein schiefwinkliges Koordinatensystem ausgedrückt. Das Gauß-Krüger-System besitzt rechtwinklige Koordinaten, was bzgl. geodätisch-mathematischer Transformationen wesentlich günstiger ist (Wagner, 1958). Auch treten im schiefwinkligen Koordinatensystem in Richtung der Längengrade positive und negative Werte in Bezug zum Nullmeridian (Greenwich) auf.
Das Gauß-Krüger-System bildet nur einen schmalen Meridianstreifen ab, dem ein Hauptmeridian zugrunde liegt. Für Deutschland sind dies die Meridiane 3, 6, 9, 12, 15, 18 und 21 ö.L. von Greenwich. Jedes Einzelsystem erstreckt sich 1°30' östlich und westlich seines Mittelmeridians. Der Nullpunkt für die Zählung von N-S-Strecken liegt im Äquator; auf ihm sind die am rechten und linken Blattende angegebenen Hochwerte (y) in Km bezogen. Der Rechtswert (x) ist von einem 500 km westlich gelegenem Zählpunkt gerechnet und am oberen und unterem Blattrand angegeben. Diesem Wert ist die Kennziffer der Hauptmeridiane vorausgestellt (z.B. 3° = 1; 6° = 2; 9° = 3; 12° = 4 usw., d.h. die Zahl des Hauptmeridians wird durch 3 geteilt). Aus den randlich angegebenen Rechts- und Hochwerten können die Koordinaten jedes Punktes im Gitternetz abgegriffen werden (Abb. 1.1.8). Auch Flächen lassen sich direkt ermitteln: Auf einer TK-100 umfaßt beispielsweise ein Quadrat mit der Seitenlänge 5 cm genau 25 km 2.
Abb. 1.1.8: Die Gauß-Krüger Kartenblätter(Wagner, 1958).
Um negative Rechtswerte in Bezug zum Hauptmeridian zu vermeiden, erhält jeder Hauptmeridian den Wert 500.000 (Abb. 1.1.9). Demnach werden Punkte, die östlich des Hauptmeridians liegen zu 500.000 addiert, westliche subtrahiert. Der Nullpunkt für z.B. den 9°-Hauptmeridian wird durch den Schnittpunkt des Meridians mit dem Äquator gebildet und lautet in diesem Fall: RW 3.500.000 - HW 0.0!
Abb. 1.1.9: Das Gauß-Krüger Kartenblatt TK-50 (1 : 50.000) von Münster (TOP 50, 1997)